


Digital Twin and Vertical Integration |
Support for sustainability concepts in production processes
| Journal | Industry 4.0 Science |
| Issue | Volume 40, 2024, Edition 3, Pages 67-72 |
| Bibliography | Share | Cite | Download |
Abstract
Keywords
Article
Horizontal integration in the sense of networking between individual components of manufacturing companies serves, among other things, to automate processes based on semantically similar aggregated data models [1]. Machines can communicate and interact with each other and thus adapt and react to changing conditions. Effective communication requires the standardized use of protocols and the creation of platform- and language-independent interfaces. The requirements for standards, both in terms of protocols and the underlying data models, have increased significantly in recent years.
Vertical integration, on the other hand, involves the integration of machine data into higher-level company processes, mapped in the digital company twin. Efficient vertical integration is intended to support companies in achieving sustainability goals, among other things [2]. In the future, this will not only be a competitive factor for companies and corporate alliances, but also mandatory. In recent years, the consideration of sustainability indicators has increasingly become the focus of political actors both within Germany and at the European level.
In Germany, the Supply Chain Act was passed in summer 2021 and came into force at the beginning of 2023. The obligations of companies to comply with human rights and environmental due diligence obligations in their supply chains as enshrined in the law relate not only to the company’s own business activities, but also to those of their direct suppliers. The planned EU directive is even more comprehensive in its requirements, as it includes the entire value chain, not just direct suppliers [3].
In order to be able to make valid statements here, it is necessary to carry out appropriate planning and advance simulation of consumption, e.g. using tools such as the Teamcenter Carbon Footprint Calculator [4], while also making emissions and consumption levels transparent across all life cycle phases of industrial plants [5]. This approach can be supported by digital product and production passports, for example. The latter in particular should enable statements to be made about possible savings and improvement potential. To this end, data from the field must be collected, vertically integrated, analyzed and, depending on the use case, made available in a condensed form via the process twin.
The asset administration shell as part of the digital ‘resource’ twin
As has been published many times [1, 6], a digital twin is a virtual image of an ‘object’. In this context, ‘objects’ can include processes, products, assets or even services. In relation to a product or asset twin, data from the early phases of the life cycle – from the initial requirements through to the design and planning, e.g. in the digital factory environment, business data such as supplier information, and finally sensor and context data – are included. This means that a digital twin can exist before its ‘real’ twin. Another important sustainability component is added due to the requirements for ‘green automation’.
The ability to collect and provide emissions KPIs such as energy consumption figures over the life cycle will be a key requirement for digital twins in the future. This requires cross-manufacturer access to feed in and exchange data. Only horizontally and vertically integrated data that can be semantically analyzed by all parties involved (Fig. 1) will make it possible to implement traceability and quality management under increased sustainability requirements.
Asset administration shells, as frequently discussed and as explained in more detail in [5], must take these additional requirements into account. As part of the digital twin, they offer a standardized, IT-based implementation of a digital lifecycle file for products and production resources. Asset administration shells (AAS) consist of several sub-models, each of which covers one aspect of an ‘asset’ [7].
![Example architecture for vertical integration [10], modified.](https://industry-science.com/wp-content/uploads/2024/06/Dietrich_Figure-1-1-1024x545.jpg)
Example of cooperative robots
The Digital Factory Technology Lab at the HTW provides an example of the vertical integration of machine data, whereby data from the two existing Panda robot arms from the company Franka Emika is transferred to the Siemens Insights Hub platform, evaluated and visualized via dashboards throughout the operating time. The underlying objective is to make energy consumption transparent and to implement predictive maintenance scenarios by recording joint positions, speeds and acceleration parameters, torque and the operating and error status. An operational online interface must be implemented in order to record data during the operating time.
In the first prototype, robot data was connected to the Insights Hub cloud via an Open Platform Communications Unified Architecture (OPC UA) server [8]. For this purpose, a data model was first designed that represents the data and functionalities of the Franka robots in the OPC UA standard. The OPC UA Robotics Companion Specification, a standardized information model for robots [9], was used, making it easier to implement in other environments that also use OPC UA Robotics.
Communication with the robots takes place using a manufacturer-specific C++ library, which provides functions for data retrieval, parameterization and control. This data and functionality is propagated via the OPC UA server for further processing in accordance with the developed data model.
This OPC UA server is implemented using the OPC UA SDK and the data model is implemented using the UA modeler from Unified Automation GmbH.
The selected data was modeled in the Insights Hub as templates, referred to here as aspects. These aspects can be used to instantiate individual real Franka robot assets as digital twins and can also be extended to other cooperative robots. The integration architecture, including the edge device, is shown in Figure 1. The data points from the OPC UA data model can be mapped and connected to the data of the digital twin in the Insights Hub cloud via an edge device.
Via the angular velocities and torques for each joint, which were recorded directly by the robot controller via ROS (Robot Operation System) and the manufacturer-specific API at millisecond intervals, the sum of the work performed and thus the energy converted can be determined. The power used is multiplied by the operating time, which enables the power consumption to be derived in kWh. This data is then sent to the Insights hub cloud via the OPC UA standard described above.
Here, the values for each joint per robot are collected, calculated, stored and monitored on the digital asset twin. These values form the basis for predictive analyses, among other things.
Expanding the asset administration shell to include sustainability information
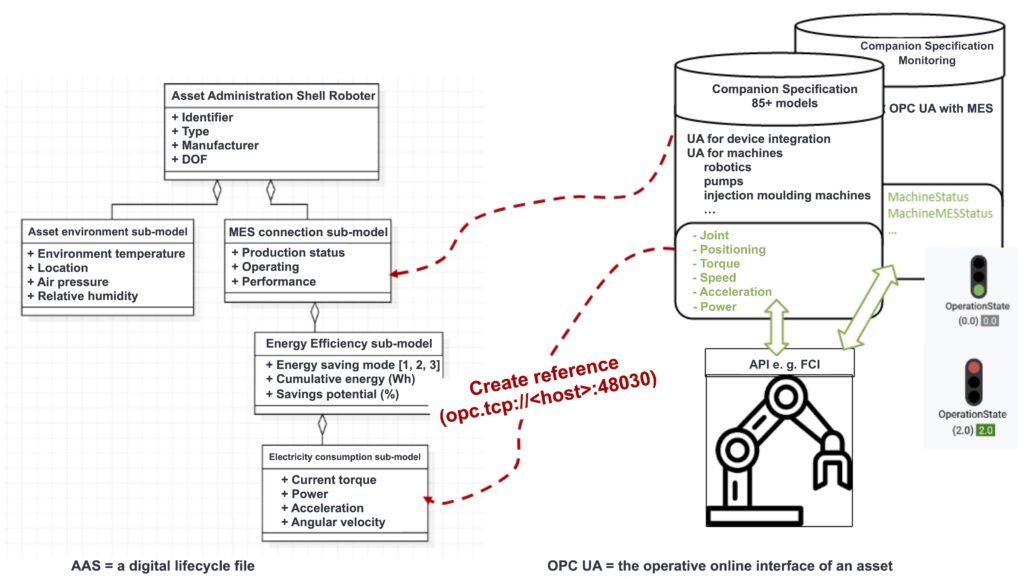
The data collected in the cloud for both robots, due to the joint movements combined with additional acceleration and deterioration data enables an overview of the current energy consumption, predictive maintenance and real-time control of the production process. In order to make this data available for further processing in a standardized way via the digital life cycle file of the robots, the next step is to connect an extended administration shell, as shown in Figure 2. Two sub-models are used for this, the “asset environment” and the “MES connection” [7]. The latter is supplemented by the “energy efficiency” sub-model.
In order to be able to utilize the real-time data from the real twins, the “energy efficiency” model is expanded to include the “electricity consumption” sub-model. This directly accesses the data already described in the extended companion specification and made available via the OPC UA. A reference to this operational online interface is stored in the administration shell both for the MES connection to determine the operating time and production status and to provide the current torque, among other things. This can be done via HTTP or MQTT, depending on the desired communication model.
Life cycle of a digital twin
One of the many challenges continues to lie in answering the questions of what data needs to be managed, and how and where this should occur. The answer depends not least on the focused business models. On the one hand, sustainability is simply required by the regulations mentioned, on the other hand it can become part of new business models. In order to be able to collect and accumulate data on the life cycle of ‘objects’, the data must, as mentioned, be collected along the entire value chain. To facilitate end-to-end collection here, the asset administration shell and OPC UA must be brought together.
The approach shown in Figure 3 represents a concept for harmonizing both standards based on [11]. A uniform description of an ‘object’ in the sense of a ‘green’ life cycle file is required. This file is part of the digital twin and is enriched with real-time data during the operating phase. This requires both the descriptive interface assigned to the asset administration shell and an operational online interface as defined and implemented in OPC UA. In order to establish a “connected world” network, all content that can be assigned to the manufactured product over the entire life cycle, e.g. a digital type plate or the CO2 footprint, must be recorded and communicated.
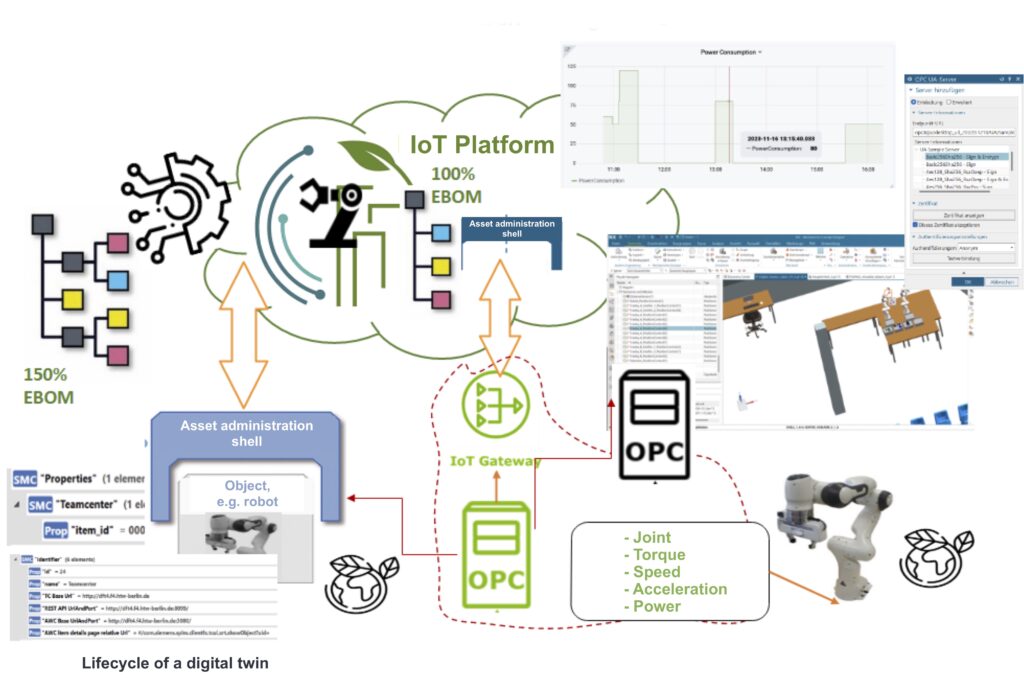
Where the data is collected also depends on various factors. Whether in a PLM system or on an IIoT platform such as Insights Hub, the ability to access and control the digital twin on-demand is crucial. It must be possible to access engineering data in the form of an engineering bill of materials (EBOM) and assign it to an individualized twin – the “instance”. Solutions for this are already offered in the asset administration shell. For example, links to the master model data can be stored in a PLM system and retrieved from there.
In addition to making the current status transparent, the real-time data collected during runtime can be used to compare simulation results that were previously generated via the digital (production) twin in the planning phase. As suggested in Figure 3, the OPC UA can not only send data to its referenced asset administration shell (and via this to the cloud), but can also make it available to the simulation model, e.g. the Siemens Mechatronics Concept Designer (Fig. 3), for updating and ‘look ahead’ simulation.
These simulations make it possible to determine the effects, e.g. on energy consumption or the quality of the product to be manufactured, in advance and thus avoid them by initiating ad hoc countermeasures if necessary. If these generated results are stored in PLM systems, for example, the information can also be ‘frontloaded’, which in turn improves the planning basis.
Bibliography
[1] Dietrich, U.: Digitaler Zwilling als Schlüsselkomponente für die Automatisierung von Systemen. In: Digitaler Zwilling in der Automatisierungstechnik, Automation Forum 2022, FH Westküste.[2] Mazak-Huemer, A. et al.: Rahmenwerk zur modellbasierten horizontalen und vertikalen Integration von Standards für Industrie 4.0. In: Handbook Industry 4.0. Berlin, Heidelberg (2020).
[3] Fritsch, M.; Zink, B.: CO2-Fußabdruck in Lieferketten: Studie für den Verein ECLASS, 31.10.2022, iWCONSULT, URL: www.iwconsult.de/projekte/co2-fussabdruck-in-lieferketten/, Accessed 10.11.2023.
[4] Siemens: Teamcenter Carbon Footprint Calculator, URL: www.plm.automation.siemens.com/media/global/en/Product-Carbon-Footprint-Calculator-Fact-Sheet_tcm27-107797.pdf, Accessed 14.10.2023.
[5] IHK Munich: Leitfaden zur Nachhaltigkeitsberichterstattung: In zehn Schritten zur CSRD, URL: www.ihk-muenchen.de/de/Service/Nachhaltigkeit-CSR/Nachhaltigkeitsberichterstattung/, Accessed 23.03.2024
[6] Grieves, M.: Digital Twin: Manufacturing Excellence Through Virtual Factory Replication, URL: innovate.fit.edu/plm/documents/doc_mgr/912/1411.0_Digital_Twin_White_Paper_Dr_Grieves.pdf, White paper, 2014, Accessed 20.09.2016.
[7] Plattform Industrie 4.0, Spezifikationen der Verwaltungsschale, URL: www.plattform-i40.de/IP/Redaktion/DE/Standardartikel/spezifikation-verwaltungsschale.html, Accessed 10.10.2023.
[8] Dodrimong, L.N.: Entwicklung eines OPC UA Servers für den Franka Emika Roboter mit digitalem Abbild in der MindSphere Cloud. Berlin University of Applied Sciences (2021).
[9] OPC Foundation: OPC 40010-1: Robotics – Vertical Integration, URL: reference.opcfoundation.org/v104/Robotics/v100, Accessed 20. 09. 2023.
[10] Dietrich, U.; Dodrimong, L.: Vertikale Integration im Kontext von Industrie 4.0. In: Designing Futures: Zukünfte gestalten. Informatics. GI Informatik Festival – September 2023, GI conference proceedings 337, pp. 289-293 (2023).
[11] Drath, R. et al.: Discussion paper – Interoperabilität mit der Verwaltungsschale, OPC UA und AutomationsML. Document version 5.3, 11.04.2023, URL: opcfoundation.org/ Accessed 17.10.2923.