Biomechanical Simulation Pipeline for Exoskeletons |
A digital tool for the targeted development of support systems
| Journal | Industry 4.0 Science |
| Issue | Volume 41, 2025, Edition 5, Pages 30-36 |
| Open Access | https://doi.org/10.30844/I4SE.25.5.30 |
| Bibliography | Share | Cite | Download |
Abstract
Article
The development of exoskeletons has attracted considerable attention in recent years, offering promising applications in industrial production, mobility support, and rehabilitation [1]. These wearable mechanical and/or robotic support structures for the human musculoskeletal system aim to reduce physical strain in a targeted manner [2]. Numerous exoskeletons have been developed for industrial use [3], varying in design and functionality. For example, they may support different parts of the body (for example back and shoulders), operate in different ways (for example via passive mechanisms such as springs or active drivers like electric or pneumatic actuators), or use diverse mechanical designs, interfaces, and materials.
In engineering, simulation models are important tools for the development and optimization of mechatronic components, providing insight into mechanical performance and control strategies [4]. Simulation models are particularly valuable for exoskeletons, as simulating human-exoskeleton interactions allows for the evaluation of design parameters and the assessment of biomechanical effects prior to physical implementation [5].
Simulation-based evaluations also contribute to refining mechanical components, enhancing efficiency, and optimizing control algorithms [6]. Compared with traditional studies involving human subjects, simulations offer several advantages: they are more cost- and time-efficient, allow rapid iteration during the design process, and provide a safe testing environment, for example for extreme configurations that may be unsafe or impractical in real-world scenarios. While simulations offer considerable flexibility, the quality of the insights depends on the accuracy of the simulation model and the input data. Therefore, validation of the simulation model and the use of high-quality datasets is essential.
Biomechanical simulations are particularly useful for analyzing the structural and functional aspects of exoskeletons. Musculoskeletal simulations (MSS) represent a specialized form of biomechanical modeling [7]. External influences on the body, such as those generated by exoskeletons or hand-held tools, can be readily incorporated into MSS (exoskeleton MSS), enabling detailed investigations of their effects on human movement and physiological load distribution.
Various approaches to exoskeleton MSS exist, differing in software, data types, and modeling methods. A systematic review of industrial exoskeleton design and evaluation using simulation modeling is provided, for example, by Ma et al. [4].
Although several studies have investigated simulation modeling [8] in the context of exoskeletons, important questions remain unanswered [4]. Most musculoskeletal simulation approaches employ unvalidated exoskeleton models or highly simplified reference frames (REFs). As a result, effects such as friction, hysteresis, and kinematic chain imperfections are often neglected. There is a need to establish a widely accepted scientific evaluation framework, such as a comprehensive simulation pipeline for industrial exoskeletons, and to develop systematic procedures for appropriate optimization-based methods [4]. Furthermore, validation of simulation models in biomechanics is essential to ensure prediction accuracy and model reliability, thereby improving the overall trustworthiness of simulation-based models [9].
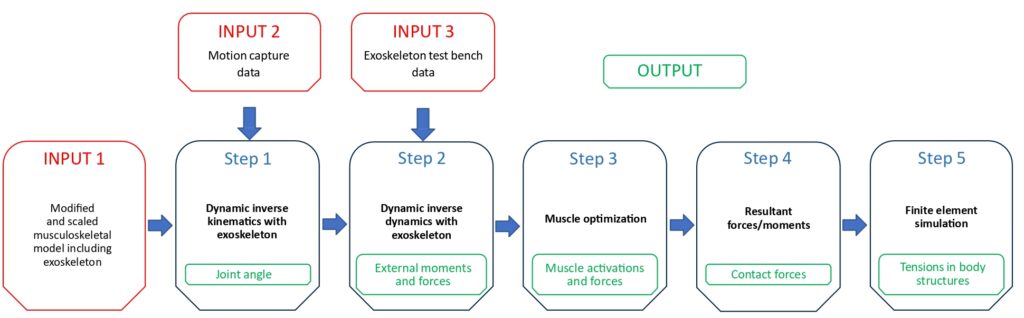
This article presents a five-step pipeline (Fig. 1) and demonstrates its application through an example use case. The pipeline facilitates the efficient evaluation of biomechanical effects and supports the iterative optimization of exoskeletons (for example in connection with design and system behavior) prior to physical implementation.
Musculoskeletal model
The first step in modeling, simulation, and analysis of a practical exoskeleton using exoskeleton MSS is the creation of a musculoskeletal simulation model (Fig. 1, INPUT 1). MSS are based on multi-body simulation, i.e., a mathematical substitute model that is used to model and analyze mechanical systems composed of multiple interconnected bodies (segments).
In musculoskeletal simulation models, each segment represents rigid bones connected at joints, depicting the human skeleton as a multi-body system. Skeletal movement is controlled by muscle force, which generates joint torques transmitted to the rigid bones via corresponding lever arms. Muscle force is generated by muscle stimuli, either predetermined in forward dynamics or, more commonly, computed so that the multi-body skeleton follows a predefined movement (inverse dynamics). The second application is particularly interesting for biomechanical analyses.
Implementation of an exoskeleton
In exoskeleton musculoskeletal simulations (MSS), the supportive effect of the exoskeleton must be implemented within the musculoskeletal model (INPUT 3). Given the use of a rigid multi-body model, the simplest approach to integrating an exoskeleton is through joint torques, which can be done using a moment-joint angle relationship [10]. Because the axes of rotation of exoskeleton joints typically do not coincide with the axes of the body joints, it is necessary to transform the torques generated by the exoskeleton into equivalent torques at the corresponding body joints.
Determination of muscle activation
The overall objective of the simulation models is to determine joint angles, joint moments, muscle force, and structural load during a given movement. These variables are crucial for evaluating and optimizing exoskeleton design. Muscle force are important both for evaluation and for determining structural load in the human body. Direct measurement of muscle force during dynamic movement is not possible. Electromyography (EMG) provides only qualitative estimates of muscle simulation. Quantitative assessment of muscle force is therefore not possible. Using MSS, muscle force can be estimated using, for example, a Hill model [11], which requires activations of individual muscles. Muscle activations in a known movement can be determined in three steps:
1) Inverse kinematics (IK): Calculate joint angles based on marker data from motion capture (INPUT 2).
2) Inverse dynamics (ID): Incorporate exoskeleton support (INPUT 3) to calculate external joint moments and forces.
3) Static optimization: Apply an optimization algorithm to determine muscle force or activations. At each step, an objective function is minimized to compute the muscle activation pattern.

Here, k describes the number of joints andn describes the number of muscles in the simulation model. In the first term of the objective function, the torques generated by the muscle force are computed from muscle activation a_m , maximum muscle forceF_m , muscle moment armsr_(m,j) , and the components of muscle force acting around the coordinate μ_(m,j). Only force generated by the contractile element is considered.
The second term does not correspond to a mechanical torque but serves as a so-called regularization term. From a mathematical point of view, this term is necessary to obtain a unique solution and to define a condition for minimizing activations, reflecting the movement strategy (for example minimal effort).
The last term accounts for all external joint torques τ_j . This optimization problem can be solved using standard solvers available in common mathematical development environments (for example fmincon in MATLAB), yielding the desired muscle activations for each individual muscle during the specified movement.
Post-processing for detailed analysis
The simulation results can subsequently be used in post-processing for a more detailed analysis. First, muscle activation during movements with and without exoskeleton support can be quantitatively compared (see application example). In the next step (step 4), the resulting joint forces and moments, particularly the contact forces, are determined. These results can be transferred into FEM software to investigate structural influences on joint structures (for example mechanical stresses in tendons, ligaments, bones, or cartilage) (step 5).
Application example: analyzing shoulder elevation under load
The presented simulation pipeline was tested in the following use case. The task involved lifting a 5kg weight above shoulder height in the sagittal plane (Fig. 2).
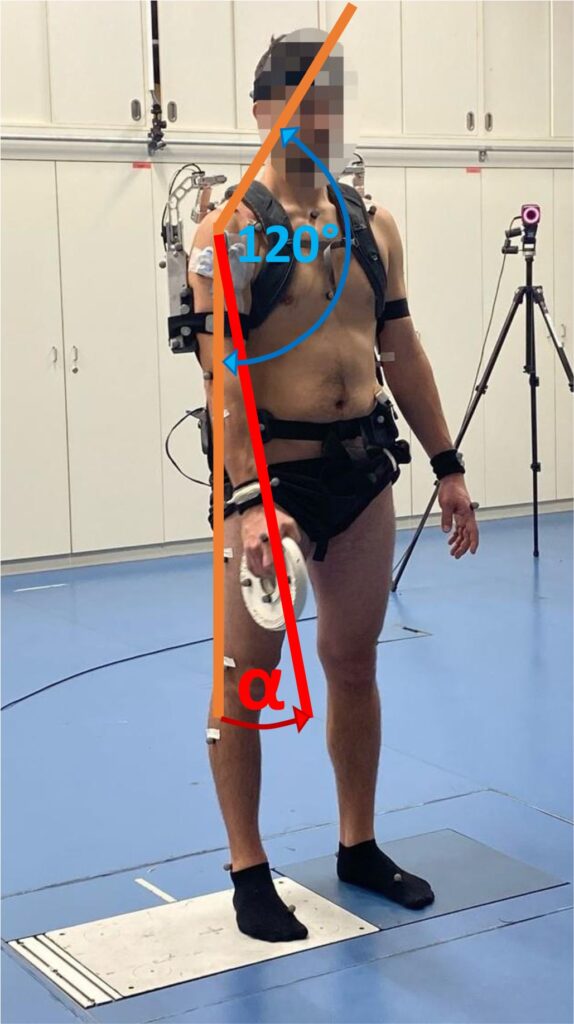
The shoulder elevation covered the entire support range of the exoskeleton (0° < shoulder elevation angle < 120°). This movement was repeated five times with and without the exoskeleton. The “Lucy” exoskeleton [12] was used at its maximum support setting. Motion data was captured with a marker-based Vicon system [13] using 39 markers (INPUT 2).
The biomechanical components were modeled using OpenSim [14], an established open-source software for modeling, simulation, and analysis in biomechanics. The Arm Swing Model [15] was used to model the shoulder, including the clavicle, scapula, and humerus as rigid bodies, thereby enabling the accurate simulation of shoulder mechanics.
The model was modified in OpenSim and OpenSim Creator [16] to integrate the geometry and kinematic chain of the exoskeleton (INPUT 1).
The modified model consisted of 3 degrees of freedom and 18 muscles. A mechanical model of the exoskeleton (INPUT 3) was created from test data and integrated into an automated MSS pipeline in Matlab using an OpenSim interface (API, Application Programming Interface).
Step 1 (Inverse Kinematics, IK): Joint angles were calculated from the motion capture marker data using the inverse kinematics solver in OpenSim.
Step 2 (Inverse Dynamics, ID): External joint moments and forces were computed in OpenSim using the inverse dynamics solver. Exoskeleton support was implemented using a regression model derived from measurement data [17] that accounted for the joint rotation axis. In addition, the measurements were performed dynamically at different speeds. Using three-dimensional smoothing splines, the regression captured the torque relationship as a function of joint angle and angular velocity.
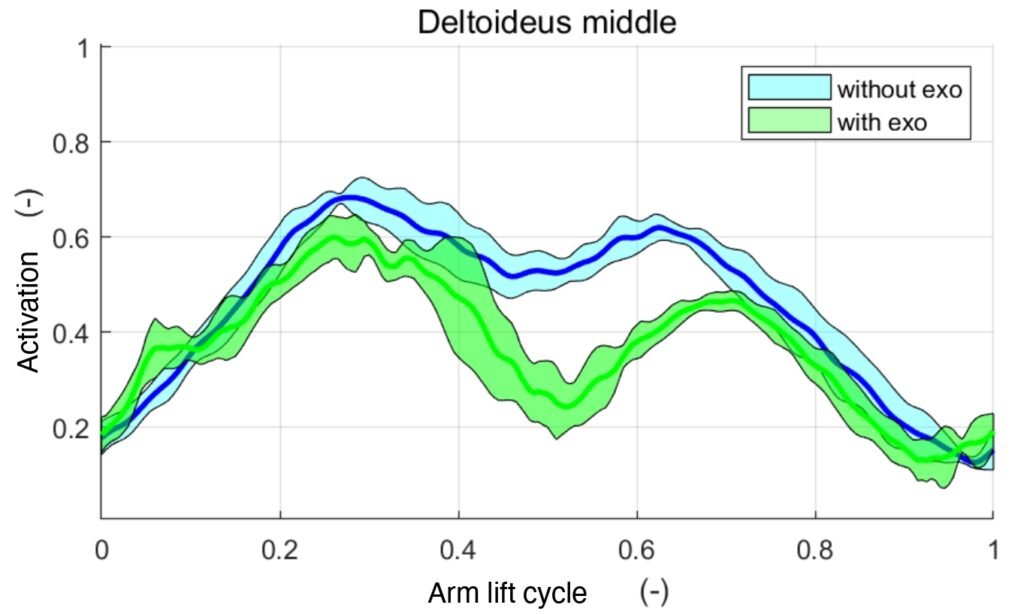
Step 3 (Muscle Activation): The optimization problem for estimating muscle activations was solved in MATLAB using the interior-point method (fmincon). Figure 3 shows the muscle activation trajectories of the middle deltoid muscle for one arm lift cycle with and without exoskeleton support. To compare these curves, the area under the curve (FuK) was calculated as a proxy for energy consumption. Without exoskeleton support, the FuK of the middle deltoid muscle activation was 1.90, whereas with support it was 1.40—a reduction of approximately 26% in energy consumption.
In addition, a qualitative validation was performed using EMG measurement data. Muscle stimulations derived from the calculated muscle activations were compared with the recorded EMG data and showed good qualitative agreement.
Step 4 was carried out in OpenSim using the “Joint Reaction Analysis” solver. The results of this analysis were then transferred to an FE program (Abaqus) (step 5).
Advantages and potential of a simulation pipeline
This paper presented a universal simulation pipeline that provides significant assistance in evaluating human-exoskeleton interaction. Unlike most musculoskeletal simulation (MSS) approaches, which often rely on simulated or highly simplified support references (REFs) of exoskeletons, the method presented here models the exoskeleton as a torque relationship.
In the application example, the exoskeleton was transferred to the humerus as an external torque at the shoulder joint. The torque relationship of the exoskeleton was derived from a regression model based on dynamic, three-dimensional measurements from a specially designed testing device. The integration of real measurement data makes it possible to capture the effects of friction, hysteresis, and imperfections in the kinematic chain, enabling a more realistic and accurate representation of the system behavior. In addition, angular velocities were included in comparison to [10].
In the application example, muscle activations were determined. The middle deltoid muscle is particularly important for the movement performed. Activations with and without the exoskeleton were compared based on the area under the activation curve. This value can be interpreted as a measure of energy consumption. For the movement with exoskeleton, the area was reduced by slightly more than 26% compared to the movement without exoskeleton.
The determination of muscle activation, i.e., the optimization problem, was solved using the static optimization method. An alternative approach is based on optimal control, which allows for greater flexibility in the objective function. This would make it possible not only to optimize muscle activation but also to include exoskeleton components (for example improved control behavior) directly in the objective function.
Such optimization strategies will be pursued in future work. Another goal is the development of a real-time simulation environment capable of calculating biomechanical effects during the execution of movements. This would enable direct adjustments to the exoskeleton’s support in real time, if necessary.
This study was funded by dtec.bw – Digitalization and Technology Research of the German Armed Forces, for which we are very grateful. dtec.bw is funded by the European Union – NextGenerationEU.
The original German version of this article can be accessed via DOI: 10.30844/I4SD.25.5.30
Bibliography
[1] Flor-Unda, O.; Casa, B.; et al.: Exoskeletons: Contribution to Occupational Health and Safety. In: Bioengineering 10 (2023) 9.[2] Bär, M.; Steinhilber, B.; et al.: The Influence of Using Exoskeletons during Occupational Tasks on Acute Physical Stress and Strain Compared to No Exoskeleton – A Systematic Review and Meta-Analysis. In: Applied Ergonomics 94 (2021).
[3] Weidner, R.; Hoffmann, N.; Linnenberg, C.; Prokop, G.: Exoskelette für den industriellen Kontext: Systematisches Review und Klassifikation, In: 66. Frühjahrskongress der Gesellschaft für Arbeitswissenschaft e.V., (2020).
[4] Ma, T.; Zhang, Y.; et al.: Modeling for Design and Evaluation of Industrial Exoskeletons: A Systematic Review. In: Applied Ergonomics 113 (2023).
[5] Niknezhad, S.; Goudarzi, A. M.: Biomechanical Evaluation of Compliance Joint Knee Exoskeleton During Normal Gait. In: International Journal of Engineering 37 (2024), pp. 2099-2108.
[6] Kenas, F.; Saadia, N.; et al.: Model-Free Based Adaptive BackStepping-Super Twisting-RBF Neural Network Control with α-Variable for 10 DOF Lower Limb Exoskeleton. In: International Journal of Intelligent Robotics and Applications 8 (2024), pp. 122-148.
[7] Eberle, R.; Heinrich, D.; et al.: Effect of ski boot rear stiffness (SBRS) on maximal ACL force during injury prone landing movements in alpine ski racing: A study with a musculoskeletal simulation model. In: Journal of Sports Sciences 35 (2016) 12, pp. 1125-1133.
[8] Molz, C.; Yao, Z.; et al.: A Musculoskeletal Human Model-Based Approach for Evaluating Support Concepts of Exoskeletons for Selected Use Cases. In: Proceedings of the Design Society 2 (2022), pp. 515-524.
[9] Kebbach, M.; Hucke, L.; et al.: Numerische Simulation in der muskuloskelettalen Biomechanik. In: Orthopädie 53 (2024), pp. 487-493.
[10] Van der Have, A.; Rossini, M.; et al.: The Exo4Work Shoulder Exoskeleton Effectively Reduces Muscle and Joint Loading during Simulated Occupational Tasks above Shoulder Height. In: Applied Ergonomics 103 (2022).
[11] Zajac, F. E.: Muscle and Tendon: Properties, Models, Scaling, and Application to Biomechanics and Motor Control. In: Critical Reviews in Biomedical Engineering 17 (1989), pp. 359-411.
[12] Otten, B. M.; Weidner, R.; et al.: Evaluation of a Novel Active Exoskeleton for Tasks at or Above Head Level. In: IEEE Robotics and Automation Letters 3 (2018) 3, pp. 2408-2415.
[13] Vicon Motion Systems Limited: PLUG-IN GAIT REFERENCE GUIDE. URL: https://help.vicon.com/download/attachments/11378719/Plug-in%20Gait%20Reference%20Guide.pdf, accessed 20.02.2025.
[14] Delp, S. L.; Anderson, F. C.; et al.: OpenSim: Open-Source Software to Create and Analyze Dynamic Simulations of Movement. In: IEEE Transactions on Biomedical Engineering 54 (2007), pp. 1940-1950.
[15] Goudriaan, M.; Jonkers, I.; et al.: Arm Swing in Human Walking: What Is Their Drive? In: Gait Posture 40 (2014), pp. 321-326.
[16] TU Delft: OpenSim Creator 0.5.14. URL: https://www.opensimcreator.com/, accessed 20.02.2025.
[17] Dangel, L.; Reimeir, B.; et al.: ExoPowerCheck: A performance test bench to measure support behavior of exoskeletons with single-DoF support. In: Conference proceedings MHI Colloquium 2024.