Biomechanische Simulationspipeline für Exoskelette |
Digitales Hilfsmittel zur zielgerichteten Entwicklung von Unterstützungssystemen
| Zeitschrift | Industry 4.0 Science |
| Ausgabe | 41. Jahrgang, 2025, Ausgabe 5, Seite 30-36 |
| Open Access | https://doi.org/10.30844/I4SD.25.5.30 |
| Literatur | Teilen | Zitieren | Download |
Abstract
Keywords
Artikel
Die Entwicklung von Exoskeletten hat in den letzten Jahren große Aufmerksamkeit erlangt und bietet vielversprechende Anwendungen in der industriellen Produktion, Mobilitätsunterstützung und Rehabilitation [1]. Diese anziehbaren mechanischen und/oder robotischen Stützstrukturen für den menschlichen Bewegungsapparat zielen darauf ab, die körperliche Beanspruchung gezielt zu reduzieren [2].
Mittlerweile wurden für industrielle Anwendungen eine Vielzahl von Exoskeletten entwickelt [3], die einen unterschiedlichen Aufbau und Verhaltensweise besitzen. Beispielsweise unterstützen sie verschiedene Körperregionen (z. B. Rücken, Schulter), sind unterschiedlich angetrieben (z.B. passiv mittels Federsysteme, aktiv mittels elektrischer oder pneumatischer Antriebe) oder nutzen verschiedene mechanische Konstruktionen, Schnittstellen und Materialien.
In den Ingenieurswissenschaften sind Simulationsmodelle wichtige Werkzeuge für die Entwicklung und Optimierung von mechatronischen Bauteilen. Sie liefern wertvolle Einblicke in deren mechanische Leistung und Steuerungsstrategien [4]. Simulationsmodelle bieten sich auch ideal für Exoskelette an. Durch die Simulation der Interaktion zwischen Exoskelett und menschlichem Körper können sie Gestaltungsparameter bewerten und biomechanische Effekte vor der physischen Implementierung beurteilen [5].
Zudem tragen sie dazu bei, mechanische Komponenten zu verfeinern, die Effizienz zu steigern und Steuerungsalgorithmen zu optimieren [6]. Simulationsbasierte Evaluierungen bieten mehrere Vorteile gegenüber traditionellen Untersuchungen mit ProbandInnen. Sie sind kosten- und zeiteffizienter und ermöglichen schnelle Iterationen während des Gestaltungsprozesses. Außerdem bieten Simulationen eine sichere Testumgebung, beispielsweise um extreme Konfigurationen zu testen, die in realen Szenarien unsicher oder unpraktisch sein können. Während Simulationen zwar mehr Flexibilität bieten, hängt die Qualität der gewonnenen Erkenntnisse von der Qualität des Simulationsmodells und der Eingangsdaten ab. Daher erweist sich eine Validierung des Simulationsmodells und eine gute Datenbasis als unerlässlich.
Eine zentrale Rolle bei der Analyse der strukturellen und funktionellen Aspekte von Exoskeletten spielen dabei biomechanische Simulationen. Eine spezielle Form von biomechanischen Simulationen sind insbesondere muskuloskelettale Simulationen (MSS) [7]. Auch äußere Einwirkungen auf den Körper, die beispielsweise durch Exoskelette oder in der Hand gehaltene Werkzeuge eingeleitet werden, lassen sich in MSS leicht implementieren (Exoskelett-MSS).
Dies ermöglicht eine detaillierte Untersuchung der Auswirkungen eines Exoskeletts auf menschliche Bewegungen und die physiologische Lastverteilung. Es gibt verschiedene Ansätze für Exoskelett-MSS, die sich in der Softwareanwendung, den Datentypen und der Modellierung der Exoskelette unterscheiden. Eine systematische Literaturübersicht über die Gestaltung und Bewertung industrieller Exoskelette mittels Simulationsmodellierung findet sich beispielsweise in Ma et al. [4].
Obwohl bereits mehrere Studien im Bereich der Simulationsmodellierung durchgeführt wurden [8], bleiben einige Fragen offen [4]. Die meisten muskuloskelettalen Simulationsansätze verwenden nicht validierte simulierte Exoskelette oder stark vereinfachte Stützreferenzen (REFs) des Exoskeletts. Dadurch werden die Auswirkungen von Reibung, Hysterese und Imperfektionen in der kinematischen Kette auf das Exoskelett nicht berücksichtigt. Außerdem sollte ein allgemein anerkanntes wissenschaftliches Bewertungssystem wie beispielsweise eine Simulationspipeline für industrielle Exoskelette etabliert werden.
Darüber hinaus müssen systematische Vorgehensweisen für geeignete optimierungsbasierte Methoden entwickelt werden [4]. Auch ist die Validierung von Simulationsmodellen in der Biomechanik von entscheidender Bedeutung, um die Genauigkeit der Vorhersagen und die Zuverlässigkeit der Modelle sicherzustellen und somit die Vertrauenswürdigkeit der Simulationsmodelle zu verbessern [9].
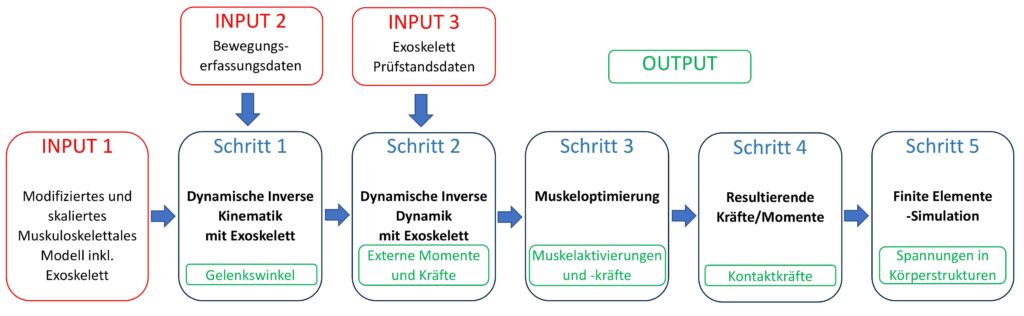
In diesem Beitrag wird eine aus fünf Schritten bestehende Pipeline vorgestellt (Bild 1) und anschließend in einem Anwendungsbeispiel angewendet. Diese Pipeline verbessert die effiziente Bewertung biomechanischer Effekte und unterstützt die iterative Optimierung von Exoskeletten (z.B. Gestalt und Systemverhalten) vor der physischen Umsetzung.
Muskuloskelettales Model
Für die Modellierung, Simulation und Analyse eines praxistauglichen Exoskelettes mittels Exoskelett-MSS wird zunächst ein muskuloskelettales Simulationsmodel benötigt (Bild 1, INPUT 1). MSS basieren auf einer Mehrkörpersimulation, also einem mathematisches Ersatzmodell, das zur Modellierung und Analyse von mechanischen Systemen, die aus mehreren miteinander verbundenen Körpern (Segmente) bestehen, angewendet wird.
In muskuloskelettalen Simulationsmodellen entsprechen die einzelnen Segmente starren Knochen, die an den Gelenken verbunden sind und so das menschliche Skelett als Mehrkörper beschreiben. Die Bewegung des menschlichen Skelettes wird über Muskelkräfte gesteuert, die durch Drehmomente in den Gelenken berücksichtigt werden. Über entsprechende Hebelarme übertragen die Muskelkräfte Drehmomente in den Gelenken auf die starren Knochen. Muskelkräfte werden über Muskelanregungen erzeugt, welche vorgegeben (Vorwärtsdynamik) oder, wie es in der Praxis häufiger vorkommt, so bestimmt werden, dass das Mehrkörper Skelett einer vorgegebenen Bewegung (z.B. aus Bewegungserfassungsdaten) folgt (Inverse Dynamik). Für biomechanische Analysen ist vor allem die zweite Anwendung interessant.
Implementierung eines Exoskeletts
Für ein Exoskelett-MSS muss die unterstützende Wirkung des Exoskeletts in das muskuloskelettales Simulationsmodel implementiert werden (INPUT 3). Da ein starres Mehrkörpermodell betrachtet wird, ist die einfachste Möglichkeit, ein Exoskelett im MSS über Drehmomente zu integrieren. Dies kann durch eine Momenten-Gelenkswinkel-Beziehung [10] erfolgen. Da typischerweise die Rotationsachsen der Gelenke des Exoskeletts nicht identisch mit den Rotationsachsen der Körpergelenke sind, ist darauf zu achten, dass die Drehmomente, die das Exoskelett erzeugt, auf die Drehmomente in den Körpergelenken transformiert werden können.
Ermittlung der Muskelaktivierung
Das übergeordnete Ziel ist es, mithilfe von Simulationsmodellen aus einer bekannten Bewegung die auftretenden Gelenkswinkel, Gelenksmomente, Muskelkräfte und strukturelle Belastungen zu ermitteln. Diese Größen helfen bei der Bewertung und Entwicklung von Exoskeletten. Muskelkräfte sind zum einen wichtige Größen zur Bewertung und werden zum anderen auch benötigt, um strukturelle Belastungen im menschlichen Körper zu bestimmen. Muskelkräfte können in einer dynamischen Bewegung messtechnisch praktisch nicht ermittelt werden.
Es können nur Muskelanregungen mittels Elektromyographie (EMG) qualitativ bestimmt werden. Eine quantitative Beurteilung der Muskelkräfte ist dadurch nicht möglich. Mittels MSS lassen sich Muskelkräfte beispielsweise durch ein Hill-Modell [11] bestimmen. Dazu sind die Muskelaktivierungen der einzelnen Muskeln nötig. Die Muskelaktivierungen einer bekannten Bewegung können in drei Schritten ermittelt werden:
1) Ausführung der inversen Kinematik (IK), um Gelenkwinkel basierend auf Markerdaten aus einer Bewegungserfassung (INPUT 2) zu berechnen.
2) Ausführung der inversen Dynamik (ID) unter Berücksichtigung der Exoskelett-Unterstützung (INPUT 3), um externe Gelenkmomente und -kräfte zu berechnen.
3) Optimierungsalgorithmus, um Muskelkräfte bzw. Muskelaktivierungen zu bestimmen (Static Optimization). Zur Berechnung der Muskelaktivierung soll in jedem einzelnen Zeitschritt folgende Zielfunktion minimiert werden

Hier beschreibt k die Anzahl der Gelenke und n die Anzahl der Muskeln des Simulationsmodells. Im ersten Term der Zielfunktion werden die Drehmomente, die durch die Muskelkräfte aus der Muskelaktivierung a_m, der maximalen Muskelkraft F_m, dem Muskelmomentarm r_(m,j) und der um die Koordinate wirkenden Muskelkraftkomponente μ_(m,j) erzeugt werden, berechnet.
Es wurden ausschließlich die vom kontraktilen Element erzeugten Kräfte berücksichtigt. Der zweite Term entspricht keinem mechanischem Drehmoment, sondern ist ein sogenannter Regularisierungsterm. Dieser Term ist aus mathematischer Sicht nötig, um eine eindeutige Lösung zu erhalten und um eine Bedingung für die Minimierung der Aktivierungen festzulegen, was der Bewegungsstrategie (z.B. minimaler Aufwand) entspricht.
Im letzten Term werden alle externen Gelenkdrehmomente τ_j berücksichtigt.
Dieses Optimierungsproblem kann mit Standardlösern in gängigen mathematischen Entwicklungsumgebungen (z.B. fmincon in MATLAB) gelöst werden und liefert die gesuchten Muskelaktivierungen der einzelnen Muskeln für die vorgegebene Bewegung.
Post-Processing für detaillierte Untersuchung
Diese Ergebnisse können nun in einem Post-Processing zur detaillierten Untersuchung verwendet werden. Zunächst lassen sich die Muskelaktivierungen bei Bewegungen mit und ohne Exoskelett quantitativ vergleichen (siehe Anwendungsbeispiel). In einem weiteren Schritt (Schritt 4) lassen sich die resultierenden Kräfte und Momente, insbesondere die Kontaktkräfte, in den Gelenken ermitteln. Diese Ergebnisse können beispielsweise in einer FEM-Software implementiert werden, um strukturelle Einflüsse auf die Gelenksstrukturen (z.B. mechanische Spannungen in Sehnen, Bänder, Knochen, Knorpel) zu untersuchen (Schritt 5).
Anwendungsbeispiel zur Analyse der Schulterelevation unter Belastung
Die vorgestellte Pipeline wurde nun im folgenden Anwendungsfall getestet. Die Aufgabe bestand darin, ein 5 kg schweres Gewicht über Schulterelevation in der Sagittalebene anzuheben (Bild 2).
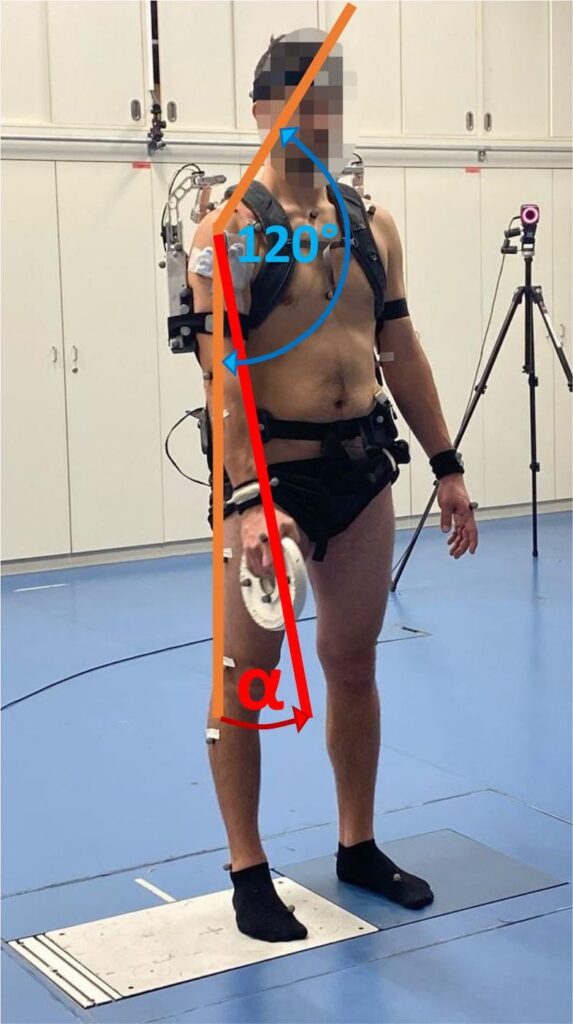
Die Schulterelevation umfasste den gesamten Stützbereich des Exoskeletts (0° < Schulterelevationswinkel < 120°). Diese Bewegung wurde fünfmal mit und ohne Exoskelett wiederholt. Es wurde das Exoskelett “Lucy” [12] verwendet und auf die maximale Stützstufe eingestellt. Zur Erfassung der Bewegungen wurde ein markerbasiertes Vicon-System [13] mit 39 Marker verwendet (INPUT 2).
Die Modellierung der biomechanischen Komponenten erfolgte mit OpenSim [14], eine etablierte und weit verbreitete Open-Source-Software zur Modellierung, Simulation und Analyse in der Biomechanik.
Für die Modellierung der Schulter wurde das Arm-Swing Model [15] verwendet. Es umfasst das Schlüsselbein, das Schulterblatt und den Oberarmknochen als starre Körper, was eine genaue Simulation der Schultermechanik ermöglicht.
Das Model wurde schließlich in OpenSim und OpenSim Creator [16] modifiziert, um die Geometrie und kinematische Kette des Exoskeletts zu integrieren (INPUT 1). Das modifizierte Modell umfasst 3 Freiheitsgrade und 18 Muskeln.
Ein mechanisches Modell des Exoskeletts (INPUT 3) wurde anhand von Testdaten erstellt und mithilfe einer OpenSim-Schnittstelle (API, Application Programming Interface) in eine automatisierte MSS-Pipeline in Matlab implementiert.
Schritt 1, die Ausführung der inversen Kinematik (IK), um Gelenkwinkel basierend auf Markerdaten aus einer Bewegungserfassung (INPUT 2) zu berechnen, wurde in OpenSim mit Hilfe des inversen Kinematik-Solver ermittelt.
Schritt 2, die Berechnung der inversen Dynamik (ID) unter Berücksichtigung der Exoskelett-Unterstützung (INPUT 3), um externe Gelenkmomente und -kräfte zu berechnen, wurde auch in OpenSim (mittels dem inversen Dynamik-Solver) durchgeführt. Die Exoskelett-Unterstützung wurde mit Hilfe eines Regressionsmodells implementiert. Dieses wurde auf Basis von Messdaten einer Messeinrichtung [17] erstellt, die die Rotationsachse des Gelenks berücksichtigen. Außerdem wurden die Messungen dynamisch bei unterschiedlichen Geschwindigkeiten durchgeführt. Dadurch konnte eine Drehmomentenbeziehung (dreidimensionale glättende Splines) erstellt werden, die neben den Gelenkswinkeln auch die Gelenkswinkelgeschwindigkeiten berücksichtigt.
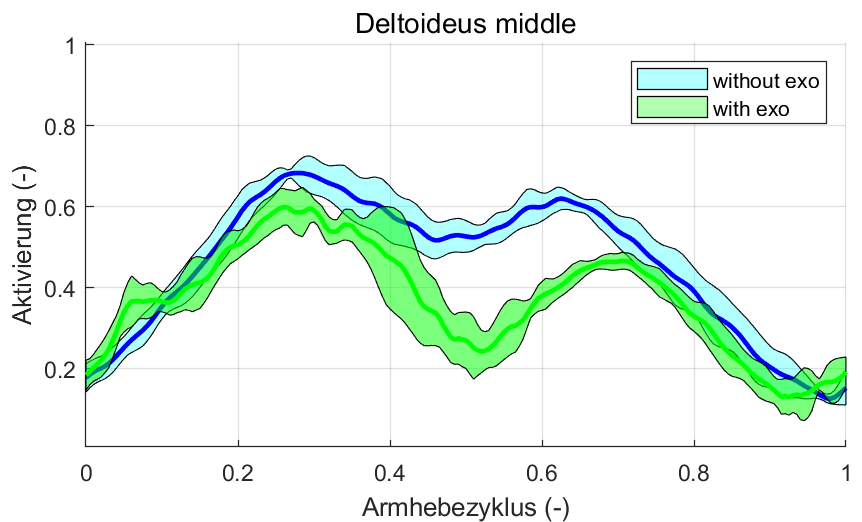
Schritt 3, das Optimierungsproblem, um die Muskelkräfte bzw. die Muskelaktivierungen der einzelnen Muskeln zu bestimmen, wurde in MATLAB mittels Innere-Punkte-Methode (fmincon) gelöst. Die Ergebnisse der Muskelaktivierungspfade für den M. deltoideus middle mit und ohne Exoskelett sind in Bild 3 dargestellt. Um diese beiden Kurve zu vergleichen, wurde die Fläche unter der jeweiligen Kurve (FuK) bestimmt, die zur Berechnung des unterschiedlichen Energieverbrauchs verwendet werden kann. Bei der Bewegung ohne Exoskelett lag die FuK für die Muskelaktivierung des M. deltoideus middle bei 1.90, während sie bei der Bewegung mit Exoskelett bei 1.4 lag. Dies entspricht einem relativen Unterschied von ca. 26 % weniger Energieverbrauch bei der Bewegung mit Exoskelett.
Außerdem wurde eine qualitative Validierung anhand von EMG Messdaten durchgeführt. Die Muskelanregungen wurden aus den berechneten Muskelaktivierungen berechnet. Diese stimmten mit den Muskelanregungen aus den EMG Daten qualitativ gut überein.
Schritt 4 wird wieder in OpenSim mittels “Joint Reaction Analysis”-Solver durchgeführt. Die Ergebnisse dieser Analyse werden dann schließlich in ein FE-Programm (Abaqus) implementiert (Schritt 5).
Vorteile und Potential einer Simulationspipeline
In dieser Arbeit wurde eine Simulationspipeline vorgestellt, die universell angewandt und so bei der Evaluierung der Mensch-Exoskelett-Interaktion wesentliche Hilfe leisten kann.
Während die meisten muskuloskelettalen Simulationsansätze mit Exoskeletten simulierte oder stark vereinfachte Stützreferenzen (REFs) des Exoskeletts verwenden, wurde hier das Exoskelett als Drehmomentbeziehung betrachtet. Im Anwendungsbeispiel wurde das Exoskelett als externes Drehmoment in der Schulter auf den Humerus übertragen. Die Drehmomentbeziehung des Exoskeletts wurde hier als Regressionsmodell aus dynamischen, dreidimensionalen Messungen aus einer speziell konzipierten Messeinrichtung bestimmt. Durch die Verwendung realer Messdaten werden die Auswirkungen von Reibung, Hysterese und Imperfektionen in der kinematischen Kette auf das Exoskelett berücksichtigt, was eine realistischere und genauere Darstellung des Systemverhaltens ermöglicht. Außerdem wurden im Vergleich zu [10] auch die Winkelgeschwindigkeiten miteinbezogen.
Im Anwendungsbeispiel wurden die Aktivierungen der Muskeln bestimmt. Für die durchgeführte Bewegung ist vor allem der Muskel M. deltoideus middle von Bedeutung. Es wurden die Aktivierungen dieses Muskels mit und ohne Exoskelett anhand der Fläche unter der Aktivierungskurve bestimmt. Dieser Wert kann als eine Art Energieverbrauch interpretiert werden. Für die Bewegung mit Exoskelett ergab sich im Vergleich zur Bewegung ohne Exoskelett eine Verminderung der Fläche um etwas mehr als 26 %.
Die Bestimmung der Muskelaktivierung, also das Optimierungsproblem, wurde über die Methode der Static Optimization gelöst. Eine alternative Lösung, basiert auf einem Ansatz aus der Optimalen Steuerung., welcher mehr Flexibilität in der Zielfunktion ermöglicht. Dadurch könnten in der Zielfunktion neben der Muskelaktivierung auch Komponenten des Exoskeletts (z. B. verbessertes Steuerungsverhalten) optimiert werden. Diese Art der Optimierung soll in Zukunft auch verfolgt werden. Ein weiteres Ziel für die Zukunft ist, eine echtzeitfähige Simulationsumgebung zu schaffen, welche biomechanischen Effekte direkt während der Ausführung der Bewegung bestimmen kann, um so gegebenenfalls direkt in der Unterstützung des Exoskeletts einzugreifen.
Diese Studie wurde von dtec.bw – Digitalisierungs- und Technologieforschung der Bundeswehr, finanziert, wofür wir uns sehr bedanken. dtec.bw wird von der Europäischen Union – NextGenerationEU gefördert.
Dies ist ein Originalbeitrag. Die englische Übersetzung finden Sie unter der DOI: 10.30844/I4SE.25.5.30
Literatur
[1] Flor-Unda, O.; Casa, B. u.a.: Exoskeletons: Contribution to Occupational Health and Safety. In: Bioengineering 10(9) (2023).[2] Bär, M.; Steinhilber, B. u.a.: The Influence of Using Exoskeletons during Occupational Tasks on Acute Physical Stress and Strain Compared to No Exoskeleton – A Systematic Review and Meta-Analysis. In: Applied Ergonomics 94 (2021).
[3] R. Weidner, N. Hoffmann, C. Linnenberg, G. Prokop: Exoskelette für den industriellen Kontext: Systematisches Review und Klassifikation, In: 66. Frühjahrskongress der Gesellschaft für Arbeitswissenschaft e.V., (2020).
[4] Ma, T.; Zhang, Y. u.a.: Modelling for Design and Evaluation of Industrial Exoskeletons: A Systematic Review. In: Applied Ergonomics 113 (2023).
[5] Niknezhad, S.; Goudarzi, A.M.: Biomechanical Evaluation of Compliance Joint Knee Exoskeleton During Normal Gait. In: International Journal of Engineering 37 (2024), S. 2099–2108.
[6] Kenas, F.; Saadia, N. u.a.: Model-Free Based Adaptive BackStepping-Super Twisting-RBF Neural Network Control with α-Variable for 10 DOF Lower Limb Exoskeleton. In: International Journal of Intelligent Robotics and Applications 8 (2024), S. 122–148.
[7] Eberle, R.; Heinrich, D. u.a.: Effect of ski boot rear stiffness (SBRS) on maximal ACL force during injury prone landing movements in alpine ski racing: A study with a musculoskeletal simulation model. In: Journal of Sports Sciences 35(12) (2016), S. 1125–1133.
[8] Molz, C.; Yao, Z. u.a.: A Musculoskeletal Human Model-Based Approach for Evaluating Support Concepts of Exoskeletons for Selected Use Cases. In: Proceedings of the Design Society 2 (2022), S. 515-524.
[9] Kebbach, M.; Hucke, L. u.a.: Numerische Simulation in der muskuloskelettalen Biomechanik. In: Orthopädie 53 (2024), S. 487–493.
[10] Van der Have, A.; Rossini, M. u.a.: The Exo4Work Shoulder Exoskeleton Effectively Reduces Muscle and Joint Loading during Simulated Occupational Tasks above Shoulder Height. In: Applied Ergonomics 103 (2022).
[11] Zajac, F.E.: Muscle and Tendon: Properties, Models, Scaling, and Application to Biomechanics and Motor Control. In: Critical Reviews in Biomedical Engineering 17 (1989), S. 359–411.
[12] Otten, B.M.; Weidner, R. u.a.: Evaluation of a Novel Active Exoskeleton for Tasks at or Above Head Level. In: IEEE Robotics and Automation Letters 3 (2018) 3, S. 2408–2415.
[13] Vicon Motion Systems Limited: PLUG-IN GAIT REFERENCE GUIDE. URL: https://help.vicon.com/download/attachments/11378719/Plug-in%20Gait%20Reference%20Guide.pdf, Abrufdatum: 20.02.2025.
[14] Delp, S.L.; Anderson, F.C. u.a.: OpenSim: Open-Source Software to Create and Analyze Dynamic Simulations of Movement. In: IEEE Transactions on Biomedical Engineering 54 (2007), S. 1940–1950.
[15] Goudriaan, M.; Jonkers, I. u.a.: Arm Swing in Human Walking: What Is Their Drive? In: Gait Posture 40 (2014), S. 321–326.
[16] TU Delft: OpenSim Creator 0.5.14. URL: https://www.opensimcreator.com/, Abrufdatum: 20.02.2025.
[17] Dangel, L.; Reimeir, B. u.a.: ExoPowerCheck: A performance test bench to measure support behavior of exoskeletons with single-DoF support. In: Tagungsband MHI-Kolloquium 2024.