


Bridging Automated and Traditional Approaches in Material Transport | 
|
Why manual tugger train systems remain prevalent in intralogistics
| Journal | Industry 4.0 Science |
| Issue | Volume 41, 2025, Edition 4, Pages 60-66 |
| Bibliography | Share | Cite | Download |
Abstract
Article
Transport automation in production logistics
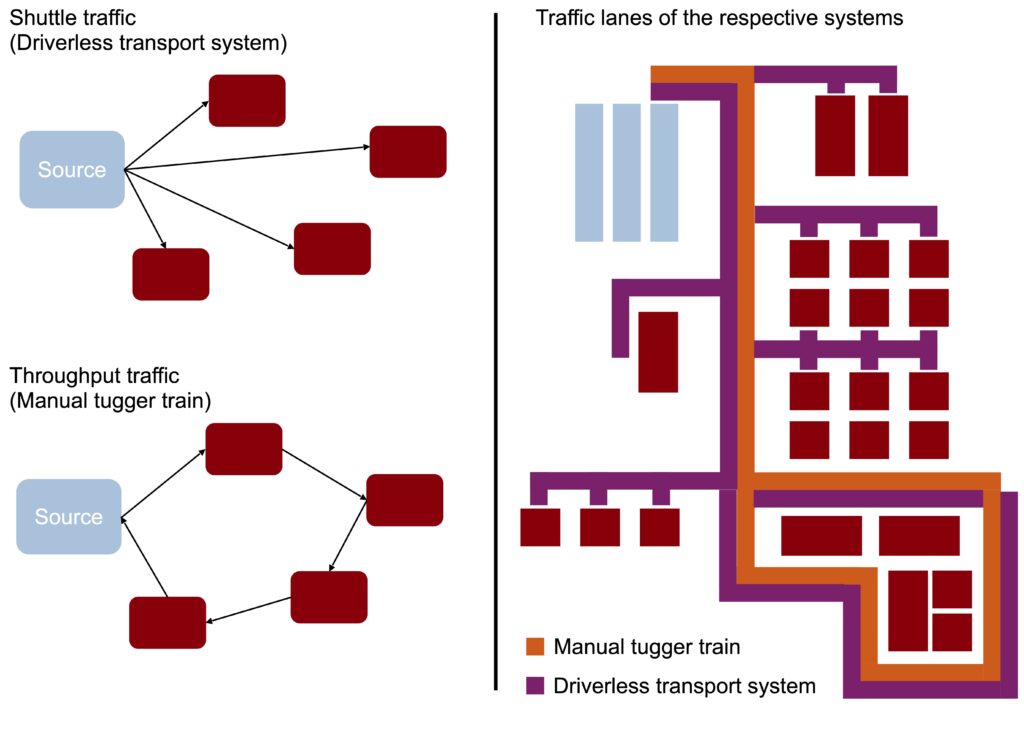
Transport processes in production logistics must ensure a reliable supply of required materials while maintaining efficiency to remain competitive. This is especially the case in high-wage countries. For irregular transport of units, various delivery concepts exist, generally divided into individual transport (shuttle traffic) and collective transport (throughput traffic) [1].
Depending on the selected delivery concept (Figure 1), different technical solutions are suitable. Manual tugger train systems are commonly used for collective transport, while automated guided vehicles (AGVs) are widely applied for shuttle services used in the manufacturing industry. Tugger train systems usually handle small batch material at high frequencies, using manually operated tow tractors with multiple trailers [2]. Driverless transport systems, on the other hand, are becoming increasingly popular in the manufacturing industry, particularly for individual transport of single-load carriers. These are defined as in-house, floor-bound transport systems with automatically guided vehicles [3].
The trend toward automation in logistics processes has been ongoing for years, with the industry is often regarded as a benchmark for addressing labor market challenges [4]. Possible goals of automation include cost and personnel savings, standardization efforts, increased system performance, and improved ergonomics [5]. Despite these advantages, companies continue to rely on manual tugger train systems rather than fully automated guided vehicles (AGVs).
This article therefore examines the factors influencing the decision to use manual tugger train systems instead of AGVs. Empirical insights are based on semi-structured, guideline-based expert interviews conducted with six logistics experts: , four from manufacturing companies in the sanitary, electrical, and pharmaceutical industries, and two from management consultancies specializing in intralogistics. This composition allows for a differentiated view of transport solutions currently in use and used in the past.
In addition, external trends influencing decision-making and expectations for future development of both systems are also considered. The interview questions were deliberately open-ended to allow for the necessary flexibility to respond in detail to the experts’ assessments. Based on the interview results, hypotheses are derived on how AGVs must evolve to overcome practical application challenges and gain wider adoption in areas currently dominated by manual tugger train systems. . The following section presents the insights from the expert interviews, thematically structured and critically examined to identify the underlying decision-making factors.
Implementation, costs, and logistical challenges
Despite efforts to identify factors beyond economic considerations, the implementation effort and associated investments remain a central concern for most experts. A manual tugger train is characterized by low implementation costs, a short implementation time, and a simplified process. These benefits are primarily attributed to their ability to be commissioned independently, their flexibility to be adapted incrementally, and their compatibility with non-digital or partially digital workflows (e.g., the use of paper-based documentation), which avoids complex system adjustments.
In contrast, AGVs are associated with high acquisition costs and time-consuming and complex implementation. . Experts highlight integration with existing IT systems, the development of an AGV control system, and the standardization of all processes, information flows, and load carriers involved as significant challenges. In addition, uncertainty regarding the total cost impact of required process and infrastructure changes was frequently cited as a significant barrier to adopting AGV systems.
Manual solutions incur high personnel costs, which can be significantly reduced through automation. Despite the high initial costs of automated systems, a rapid return on investment can be expected due to low operating costs. However, practical concerns frequently arise regarding unexpected costs and problems that could negatively impact the return on investment.
Even with automation, a certain degree of manual monitoring remains necessary. For example, the staffing demand for manual route trains, often requiring two full-time operators, can typically be reduced to half the capacity of one person for AGV supervision. Apart from personnel, vehicle speed limitations must be considered. In facilities with narrow pathways or where AGVs operate alongside pedestrian traffic, speed reductions may be required to maintain safety. This, in turn, can reduce throughput, potentially necessitating additional vehicles to maintain service levels—thereby affecting ROI. Another source of uncertainty is maintenance costs, which are often difficult to estimate in advance and may deviate significantly from initial expectations.
Requirements for flexibility and operational reliability
Flexibility in material flow systems is one of the fundamental system components of adaptable production [6]. As transport systems are responsible for the physical movement of goods between production stations, their ability to respond to changing conditions plays a decisive role in overall production efficiency.
Automated solutions are considered less flexible as they rely on a high degree of standardization. They are designed for maximum transport performance and are limited in their ability to adapt to changes in layout and fluctuating transport volumes. Manual tugger trains, by contrast, offer a significant advantage in terms of flexibility. They allow short-term adjustments to route planning and capacity, e.g., in response to dynamic customer requirements or production fluctuations. They are more compatible with varying load carriers, enabling their use in facilities with heterogeneous transport demands. They are more compatible with varying load carriers, enabling their use in facilities with heterogeneous transport demands.They provide high route flexibility, as operators can react spontaneously to obstacles, temporary layout changes, or urgent priority transport.
AGVs, on the other hand, offers expansion flexibility: once the system is installed, additional driverless transport vehicles (FTFs) can be integrated into the fleet without time-consuming configuration, additional personnel, or employee training.
Process stability is considered a priority, so anticipated problems in the implementation and operation of new systems are seen as a high risk. The use of a manual tugger train can mitigate these concerns, as operational readiness can be ensured with a significantly higher probability even before commissioning. Disadvantages include a higher susceptibility to errors due to human influence during operation and the design of supply routes.
Automated solutions, on the other hand, offer advantages by enabling consistent interruption-free transport, reduced error rates and improved ergonomics. In addition, long-term stability is promoted by increased process transparency based on continuously recorded data. Nevertheless, the process stability of an AGV during its implementation phase remains a major concern.
Ultimately, internal and external conditions influence the usability and integration of transport systems. Technical conditions play a key role here. While manual tugger trains can be freely configured and deployed at short notice, largely independently of existing systems and means of transport, AGVs require interface compatibility and communication with existing IT systems.
In addition, dependence on a single AGV manufacturer is often criticized due to incompatibilities in vehicle communication and control between different manufacturers. Manual tugger trains, on the other hand, pose safety risks due to limited visibility and route restrictions. They cannot, for instance, be used on narrow curves due to curve offset.
AGVs could be used in such areas but are more susceptible to external influences such as speed bumps and slopes. In addition, all experts emphasize the importance of human resources and the role of employees. Manual systems can be operated with minimal training, but companies are already facing considerable difficulties in recruiting personnel. This situation icompanies areworsen due to demographic change, the ongoing shortage of skilled workers, and the pressure to remain competitive despite high labor costs. Companies may be forced to automate their processes to reduce staffing requirements.
An additional challenge will then be dealing with employees’ fears of job losses and their reservations about the reliability of automated systems, potentially leading to resistance or even acts of sabotage. Moreover, commissioning and maintaining AGVs requires extensive training, which will significantly alter employee job profiles.
Potential and prerequisites for the expanded use of automated guided vehicles
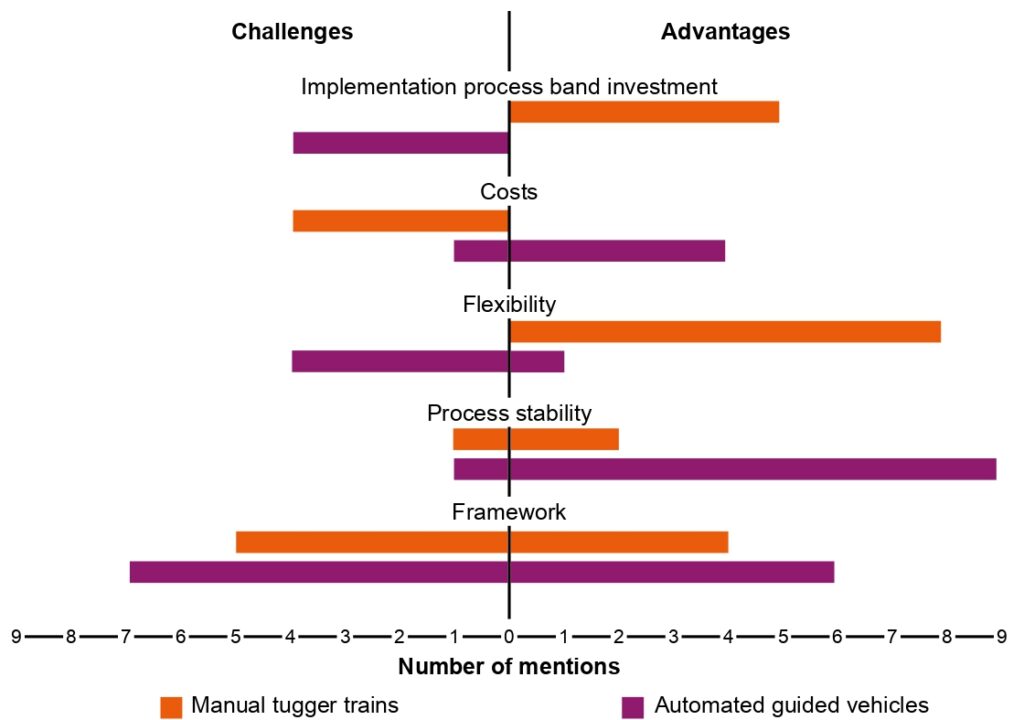
Figure 2 illustrates the challenges and advantages of both two transport systems based on the number of times they were mentioned by experts. The evaluation shows that manual tugger trains offer advantages over AGVs, particularly with regard to implementation effort, investment, and flexibility, even though they have certain disadvantages in terms of logistics costs. Against this background, the following changes can be identified as factors that would significantly favor an increased use of AGVs.
The experts expressed a desire for lower acquisition costs and greater transparency regarding total implementation costs. In addition to the scaling costs per AGV, other components of implementation, including the control system, interfaces to existing systems, and infrastructure adjustments, should be reduced. For example, structural modifications to buildings and roadways could ideally be minimized by using AGVs that are less demanding or less sensitive to environmental conditions.
To meet diverse transport requirements, a manufacturer-independent combination of different AGVs would be beneficial, ideally with greater flexibility in adjusting pick-up and delivery points. However, despite this need for flexibility, the experts still see a role for manual transport systems in the future. AGV implementation often fails due to inadequate framework conditions within companies. Achieving the required flexibility depends on a high degree of standardization and a consistent, transparent flow of information, both of which are frequently lacking. Moreover, existing infrastructure is often not designed for automation, and the necessary process adjustments can be complex, requiring stable workflows. As a result, AGV implementation tends to be more successful when planned for new sites or processes rather than when retrofitting existing structures.
Despite these challenges, automation is becoming increasingly necessary due to external factors such as demographic change and rising labor costs. The real weakness lies less in the flexibility of AGVs and more in the lack of standardization within companies.
Current trends and conclusions
In terms of costs, it should be noted that technological progress and increasing competition among suppliers are continuously driving down the prices of AGVs [7]. Advancements in technology are also expanding AGV functionality toward autonomous mobile robots (AMRs), which can independently perceive their environment and react flexibly to changes, for example, by avoiding obstacles. This makes them particularly suitable for dynamic environments and reduces the need for infrastructure modifications compared to classic AGVs, which depend on fixed routes.
However, AMRs are not necessary for all applications and are not yet widely used in industry, as automated vehicles with fixed routes are often sufficient for standardized processes. The development of manufacturer-independent communication hubs based on the VDA 5050 communication standard [8] is expected to enable interoperability between different AGV and AMR systems in the future.
Increased performance through advancements in AI-based autonomy, whose capabilities are growing exponentially (AI performance doubles approximately every seven months [9]), is expected to rapidly enhance the flexibility of transport systems. The first advanced AMRs equipped with AI-supported flexible gripping systems are already available. These allow adaptation to a variety of small load carriers and enable reliable handling in complex situations, such as the final meters of transport to and from flow-through racks at workstations [10].
This increase in flexibility, combined with lower logistics and implementation costs, is expected to gradually shift application scenarios that are currently dominated by manual route trains toward automated individual transport using AMRs.
Against this backdrop, several perspectives for future research emerge. Hybrid system solutions and corresponding evaluation approaches for investment decisions, as well as the organizational and infrastructural prerequisites for successful AGV implementation, represent promising avenues for further investigation.
This article was written as part of a collaboration between industrial companies, management consultancies, and the Cologne University of Applied Sciences. The research project entitled “Qualitative reasons for tugger train systems in logistics” by students Anna Pauline Baumann, Lena Danckwart, Sarah Sophia Eberle, Julia Racz, and Julia Zeppenfeld in the MS program Supply Chain and Operations Management served as an operational focus. We would like to express our sincere thanks to the experts interviewed for their support and commitment to this topic.
Access limited
You are currently not logged in / not yet registered.
In order to download the desired file(s), you must be logged in and have an appropriate inclusive subscription. Alternatively, you can also obtain access by paying a one-off fee.
| Subscription | included | Purchase |
|---|---|---|
| without | − | 29,00 € |
| Digital | − | 27,55 € |
| Expert | ✓ | 0,00 € |
| Professional | ✓ | 0,00 € |
All prices include 7% VAT
After purchasing access rights, you will automatically be redirected back to this page.





