Artificial Muscles and Nerves in Industry 4.0 |
Multifunctional actuator-sensor systems with shape memory alloys (SMAs) and dielectric elastomers (DEs)
| Journal | Industry 4.0 Science |
| Issue | Volume 39, 2023, Edition 1, Pages 8-15 |
| Open Access | https://doi.org/10.30844/I4SE.23.1.8 |
| Bibliography | Share | Cite | Download |
Abstract
Keywords
Article
Intelligent, responsive or smart materials are materials that have actuator properties and can simultaneously be operated as (their own) sensors. These include piezoelectric actuators, thermal and magnetic shape memory alloys and dielectric elastomers, which represent an important subgroup of electroactive polymers (EAP).
In analogy to the human body, SMA wires and dielectric elastomer actuators (DEAs) are also referred to as artificial muscles because of their actuating properties. The special, flexible forms of these actuators enable the implementation of concepts for actuator usage that were previously not possible. At the same time, their unique nerve-like self-sensing capabilities can be used to generate additional information.
Thermal shape memory alloys (SMAs)
Thermal shape memory alloys (SMAs) can “remember” an imprinted geometric shape and return to their original shape even after severe deformation. This ability is based on a reversible phase transition through the thermal shape memory effect [1]. The phase transition, which is induced by temperature and mechanical stress, is a transition between a high-temperature phase, known as austenite, and a low-temperature phase known as martensite [2, 3]. To implement actuator concepts, SMA wires made of nickel titanium (NiTi, Nitinol) are primarily used. In their cold state, these must be stretched by a biasing force, usually a spring or another SMA wire.
When energized, the wires are heated and the phase transition, instead of resulting in the well-known thermal expansion, actually leads to a contraction, which renders NiTi SMA wires technically well-suited for usage in actuators. Typical commercially available SMA wires have a phase transition temperature of 90 °C and produce strokes of 4-5% of the wire length [4, 5].
When the wires cool, a temperature hysteresis of 20-40 K becomes noticeable, so that the subsequent expansion takes place at temperatures between 70-50 °C. SMA wires have the highest energy density of all known actuator mechanisms in the order of 107 J/m3 [6, 7]. The forces that can actually be generated depend on the wire diameter.
Commercially available wire diameters currently range between 25-500 µm. For example, the strongest wire with a diameter of 500 µm can generate a force of approximately 50 N (250 MPa). Thick wires, however, cannot operate at high frequencies. The operating frequency of SMA wires essentially depends on the cooling time of the wires, and thicker wires cool more slowly due to their surface-area-to-volume ratio. For quick one-time applications, e.g. brakes or unlocking mechanisms, the activation of even thicker SMA wires is possible in the ms range [8].
With the thinnest SMA wires (25 µm diameter), frequencies of 20-30 Hz can be achieved even in cyclic operation [5]. A compromise between high forces and sufficient operating frequency at the same time is often achieved by mechanically connecting several thin SMA wires in parallel. Mechanical fatigue depends on the maximum elongation and stress to which the wire is subjected. With appropriate design, SMA wires can also achieve cycle numbers in the upper millions.
The sensor properties of the SMA wires derive from changes in electrical resistance depending on the wire strain. In contrast to the mechanical stress-strain curve, the resistance-strain curve is not largely affected by hysteresis and is thus almost linear. This fact enables direct feedback about the strain state of the wire, which is also useful, e.g. for proportional control. In addition, early detection of damage and signs of fatigue can occur by evaluating the resistance signal. The self-sensing effect therefore plays an important role in predictive maintenance and condition monitoring.
Due to the advantages mentioned above, SMA has been a core topic of German research institutions such as Fraunhofer IWU, Ruhr University Bochum, HTWG Konstanz, and Saarland University for years, and some SMA-based products have established themselves on the market. The company Actuator Solutions GmbH (ASG), which specializes in the mass production of SMA actuators, deserves special mention here. ASG’s current product portfolio includes various miniature camera modules as well as various pneumatic and fluid valves. Through fully automated systems, ASG now produces more than 10 million actuators per year with a service life of over 1 million cycles. In recent years, ASG has brought over 100 million actuators into the field [9, 10].
As part of the efforts of Industry 4.0, energy efficiency and self-sensing capabilities are particularly important for SMA technology [11]. Production plants often have a large number of mostly pneumatically operated linear actuators. The compressed air supply required for this is often one of the largest cost factors. Savings in energy consumption, weight and installation space as well as the inherent sensor properties for generating additional information make SMA technology an attractive alternative to conventional actuators. In addition to simple linear actuators, SMA wires are also used in special gripping and handling technology applications. The German company FFZ-Glashütte, for example, has been selling SMA-based microgrippers for years.
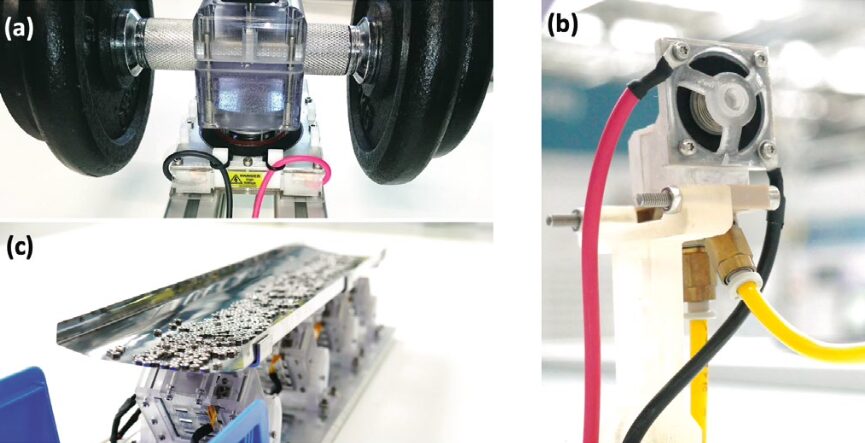
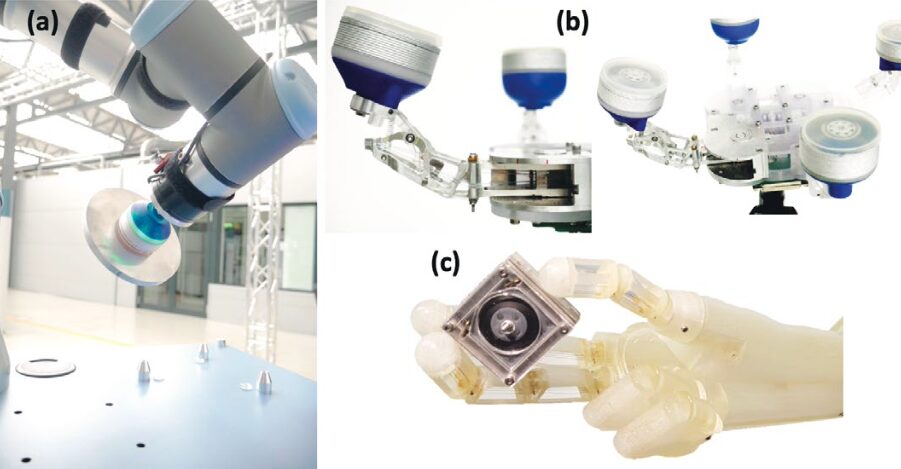
The first application example from research is a SMA-operated vacuum suction cup (see Fig. 1a). Vacuum suction cups are very common for handling components with smooth surfaces and use a continuous supply of compressed air to form a vacuum (Venturi principle). The SMA-based suction cup uses a bistable SMA actuator element [12, 13], so that no electricity is required during the suction phase. A short current pulse is only required to grip and release the components.
Thanks to an antagonistic SMA wire configuration, high switching frequencies are also possible for pick-and-place tasks. The vacuum suction cup shown in Figure 1 is designed for a load capacity of 2 kg and the integrated electronics use the self-sensing properties of the SMA wires to monitor the vacuum [14, 15].
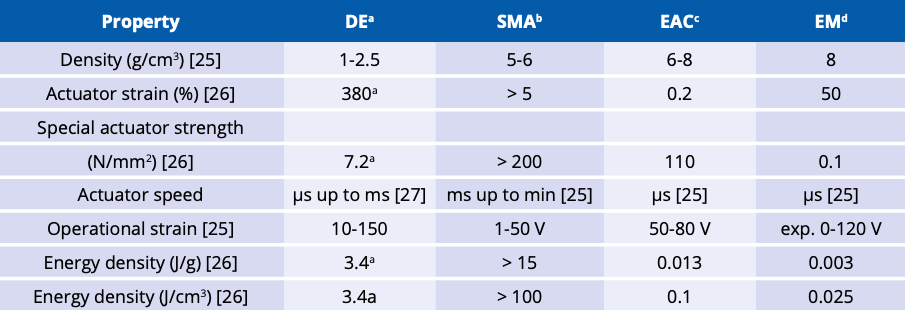
b NiTi-based SMAs
c Electroactive ceramics (EAC): PZT B, max. electrical field of 4 V/μm
d Electromagnets (EM): Values based on an array of 10 mm thick plunging coils, 50% copper, 50% permanent magnet, 1 T magnetic field, 2 ohms-cm resistivity and 40 kW/m2 power consumption.
Figure 2: Performance comparison of actuators based on intelligent materials and electromagnetic (EM) actuator principle.
Another future field of application from the area of handling and assembly are reconfigurable end effectors. End effectors for handling plane components are to be designed for special component geometries. The automatic reconfiguration of an end effector enables an assembly line to be adapted to different component shapes without replacing the entire end effector and undergoing the associated production stop.
Due to the high energy density of SMA wires, the introduction of actuators is possible without additional weight, so that no additional inertia arises during the high acceleration of process robots. The end effector prototype shown (Fig. 1b) has four independent gripper arms, each with two degrees of freedom, enabling 90° rotation in the plane and a 30° rotation out of the plane [16]. In addition to condition monitoring, the resistance signal of the SMA wires is used to control the position of the gripper arms at any angle within their radii of rotation.
The bio-inspired three-finger gripper shown in Figure 1c is another possible use of SMA technology with applications for both industry and bio-medicine. The SMA wires are arranged in an antagonistic configuration and used to move the individual phalanges independently of one another, like muscles in the human body [17]. Here too, the self-sensing property of SMA is used to control the contraction of the wires and the resulting finger movement. In addition, the gripping force can be regulated by evaluating the power consumption of the SMA wires.
Dielectric elastomers
In the simplest case, dielectric elastomers (DE) consist of a thin (typically 20-100 µm) elastomer film that is coated on both sides with an extremely thin (< 5 µm), conductive and stretchable electrode. They therefore form a flexible and expandable capacitor. Depending on the intended usage, silicones, acrylates, polyurethanes, or natural rubber are used as materials for the elastomer. The electrodes usually consist of a mixture of industrial carbon black and the base elastomer in use.
These inexpensive materials, combined with the ability to forego using rare earths, immediately constitute a major advantage in terms of costs and resource usage. Furthermore, the simple structure, combined with industrial mass production processes (such as screen printing), allows the production of cost-effective sensors, actuators, and generators for use in small, lightweight, and energy-efficient systems [18, 19].
During sensor operation, DEs are deformed or stretched by an external force. This causes a change in capacitance, which serves as a measurement signal. Such sensors can easily reach strain levels of over 100% with a dissolution level of less than 0.1% (sensitivity 0.026%), as has been evidenced by examples from Parker Hannifin Company for industrial applications [20] or by StretchSense for the detection of movement sequences [21]. Such sensors are also suitable for pressure measurement [22]. When using DEs as a generator, they must be charged with a high voltage while in the stretched state.
Through subsequent relaxation of the DEs, the mechanical energy stored during the stretch is converted into electrical energy [23, 24, 25]. Other objects of interest for research in this area include energy generation from human movement, wind, industrial vibrations, and also large-scale ocean wave energy generation. Energy harvesting concepts based on DEs can just as easily be transferred to small-scale systems in order to ensure the supply of energy-autonomous sensor systems. The application of DEs is particularly interesting for light, fast (kHz range) and energy-efficient actuators with very high strain rates, as shown in the comparison with other actuator principles in Figure 2.
If an electric field (typically 50-100 V/µm) is applied to the DE, the electrostatic attraction of the opposite charges on the two electrodes leads to a compression of the thickness of the elastomer as well as surface expansion. The actuator design determines the primary change of geometrical shape that is used to generate movement. A distinction is therefore made between stack and membrane actuators. Stack actuators typically consist of several hundred DE layers (similar to a piezo actuator) and use the change in thickness to generate high forces in the double-digit Newton range with moderate strains of approximately 10% of the initial length [29, 30, 31].
Membrane actuators, on the other hand, use the surface area changes for actuation. This allows strains > 100% to be generated, but means that the force generated lies in the low single-digit Newton range. In both designs, both stroke and force can be scaled via the actuator’s geometric configuration [32]. In addition, membrane actuators can also be stacked to generate higher levels of force. This mix of actuator concepts can generate forces of over 100 N (see Fig. 3a) [33].
The combined use of actuator and sensor effect is of particular importance for potential applications within the Industry 4.0 field. The capacity of the DEAs is constantly read during actuation. DEAs thus exhibit a self-sensing effect similar to SMA actuators, enabling the construction of intelligent and controllable actuator systems that do not require any additional sensors. A position accuracy of < 5% for dynamic [34] and < 1% for quasi-static movements can be achieved [35].
Furthermore, an additional measurement of the electrode resistance allows insight into fatigue levels of the DEAs [36]. The topics of fatigue and actuator lifespan are subjects of current research [37]. Initial studies have already shown that DEAs can survive several million operating cycles before sustaining damages [38].
In the field of adaptive optics, the number of commercially available products is still relatively small and limited to the aforementioned sensors and actuator applications produced by the company Optotune [39]. This is due, among other things, to the relatively young age of the technology (initial research in this area started in the 1990s). However, industry-related research has produced some promising areas of application in recent years. DEAs are particularly suitable for use as valve trains, as the example from Festo [40] indicates.
In another publication from Saarland University [41], a conventional solenoid valve with an electromagnet is compared with a valve where the electromagnet is replaced by a DEA (see Fig. 3b). Both valves are able to switch 3 bar and handle a maximum volume flow of 9 l/min at the same speed.
However, in practice (valve kept open for 1.5 seconds, then closed for 0.5 seconds), the DEA valve offers energy savings of over 99%, as the DE only needs to be charged once to open and can then hold its position without additional power usage. This low energy consumption means that the valve does not heat up, which could have important implications for the handling of sensitive materials. Furthermore, in contrast to the solenoid valve, the DE can also be controlled proportionally, which enables flow control.
Further studies must be initiated to ascertain whether the self-sensing functionality also allows for new findings regarding applied pressure. Another application is vibratory feeders (see Fig. 3c) [42]. The advantages of DEA use here lie primarily in their highly dynamic nature, which could enable the movement profile of a conveyor trough to adapt to new materials as they are fed through, without any additional setup time.
The self-sensing effect also leaves room for findings regarding material quantity or type of material. The highly dynamic nature of DEAs can also be used in another field of application. Thanks to their high degree of design freedom, DEs allow for the construction of highly compact and use-tailored actuators for haptic feedback, for example in buttons and touchscreens. In addition, due to their mechanical flexibility, DEA can also be incorporated into clothing items, such as gloves.
In addition to the combined use of actuators and sensors, the intrinsic resilience and elasticity of DEA and SMA actuators is an attractive property with implications for human-robot collaboration. Incorporation of low actuator masses could lead to the creation of highly secure robotics systems that, in contrast to systems that appear stiff and rigid, give a naturally soft impression.
Bibliography
[1] Janocha, H.: Adaptronics and Smart Structures. Basics, Materials, Design, and Applications. Berlin Heidelberg 2007.[2] Lagoudas, D. C.: Shape Memory Alloys: Modeling and Engineering Applications. New York 2008.
[3] Motzki, P. et al. (2023) ‘Thermische Formgedächtnislegierungen’, in Böse, H. (ed.) Smart Materials – Eigenschaften und Einsatzpotenziale. 1st edn. Würzburg: Vogel Communications Group, pp. 89-118. Available at: https://vogel-fachbuch.de/detail/index/sArticle/1086.
[4] SAES Getters. SmartFlex Brochure 2017. URL: www.saesgetters.com/sites/default/files/SmartFlex Brochure_2.pdf, accessed March 1, 2018.
[5] Dynalloy Inc. Technical Characteristics of Flexinol Actuator Wires 2017. URL: www. dynalloy.com/pdfs/TCF1140. pdf, accessed March 1, 2018.
[6] Janocha, H.: Unkonventionelle Aktoren – Eine Einführung. München 2013.
[7] Hollerbach, J. M.; Hunter, I. W.; Ballantyne, J. A.: Comparative analysis of actuator tech- nologies for robotics. In: The Robotics Review (1992) 2, pp. 299-342.
[8] Motzki, P. et al. (2018) ‘High-Speed and High-Efficiency Shape Memory Alloy Actuation’, Smart Materials and Structures, 27(7), p. 075047. doi: 10.1088/1361-665X/aac9e1.
[9] Actuator Solutions GmbH: Actuator Solutions SMA Products 2018. URL: www.actuatorsolutions.de/products/, accessed March 1, 2018.
[10] Köpfer, M.: Industrialisierung der FGL-Technologie in hochvolumigen Serienprodukt. In: VDI-Expertenforum: Smart Materials – Aus der Forschung in die industrielle Anwendung. Potsdam 2017.
[11] Theiß, R.; Czechowicz, A.; Dültgen, P.: Industry 4.0 using shape memory actuators – opportunities and challenges. In Conference: Actuator 2016. Bremen.
[12] Motzki, P.; Seelecke, S.: Bistabile Aktorvorrichtung mit einem Formgedächtniselement (2016).
[13] Motzki, P.; Seelecke, S.: Bistable Actuator Device Having A Shape Memory Element (2016).
[14] Motzki, P. and Seelecke, S. (2022) ‘Industrial Applications for Shape Memory Alloys’, in Olabi, A.-G. (ed.) Encyclopedia of Smart Materials. Elsevier, pp. 254-266. doi: 10.1016/B978-0-12-803581-8.11723-0.
[15] Motzki, P. and Rizzello, G. (2023) ‘Smart Shape Memory Alloy Actuator Systems and Applications’, in Chowdhury, P. M. A. and Rahman, D. M. M. (eds) Shape Memory Alloys – New Advances. Rijeka: IntechOpen, p. Ch. 0. doi: 10.5772/intechopen.1002632.
[16] Motzki, P. et al. (2019) ‘Design and Validation of a Reconfigurable Robotic End-effector Based on Shape Memory Alloys’, IEEE/ASME Transactions on Mechatronics, 24(1), pp. 293-303.
[17] Simone, F. et al. (2020) ‘A Soft Five-Fingered Hand Actuated by Shape Memory Alloy Wires: Design , Manufacturing , and Evaluation’, Frontiers in Robotics and AI, 7(608841). doi: 10.3389/frobt.2020.608841.
[18] Pelrine, R. E.; Kornbluh, R. D.; Joseph, J. P.: Electrostriction of polymer dielectrics with compliant electrodes as a means of actuation. In: SensorsandActuatorsA:Physical 64 (1998) 1, pp. 77-85.
[19] Carpi, F.; De Rossi, D.; Kornbluh, R. D.; Pelrine, R. E.; Sommer-Larsen, P.: Dielectric Elas- tomers as Electromechanical Transducers: Fundamentals, Materials, Devices, Models and Applications of an Emerging Electroactive Polymer Technology. Amsterdam 2008.
[20] Mateligent GmbH. Mateligent iDEAS – EAP pressure and strech[sic]/stroke sensor FlexSense Sensor Technology Demonstration [Video]. YouTube. https://www.youtube.com/watch?v=krq7LIUGZ8, accessed Nov 15, 2023.
[21] O’Brien, B.; Gisby, T.; Anderson, I. A.: Stretch sensors for human body motion. In: Proceedings of SPIE 9056 – The International Society for Optical Engineering 2014, p. 905618.
[22] York, A.; Dunn, J.; Seelecke, S.: Systematic approach to development of pressure sensors using dielectric electroactive polymer membranes. In: Smart Materials and Structures 22 (2013) 9, p. 094015.
[23] Koh, S. J. A.; Keplinger, C.; Li, T.; Bauer, S.; Suo, Z.: Dielectric Elastomer Generators: How Much Energy Can Be Converted? In: IEEE/ASME Transactions on Mechatronics 16 (2011) 1, pp. 33-41.
[24] Zanini, P.; Rossiter, J.; Homer, M.: Self-stabilizing dielectric elastomer generators. In: Smart Materials and Structures 26 (2017) 3. S. 035037.
[25] McKay, T. G.; Rosset, S.; Anderson, I. A.; Shea, H. R.: Dielectric elastomer generators that stack up. In: Smart Materials and Structures 24 (2017) 1. S. 015014.
[26] O’Halloran, A.; O’Malley, F.; McHugh, P.: A review on dielectric elastomer actuators, technology, applications, and challenges. In: Journal of Applied Physics 104 (2008) 7, p. 071101.
[27] Pelrine, R. E.; Sommer-Larsen, P.; Kornbluh, R. D.; Heydt, R.; Kofod, G.; Pei, Q. et al.: Appli- cations of dielectric elastomer actuators. In: Bar-Cohen, Y. (ed): Smart structures and materials 2001: Electroactive polymer actuators and devices. Bellingham 2001, pp. 335- 349.
[28] Bar-Cohen, Y.: Electroactive Polymers as Artificial Muscles: Capabilities, Potentials and Challenges. Reston 2000, pp. 188-196.
[29] Maas, J.; Tepel, D.; Hoffstadt, T.: Actuator design and automated manufacturing process for DEAP-based multilayer stack-actuators. In: Meccanica 50 (2015) 11, pp. 2839-2854.
[30] Haus, H.; Matysek, M.; Mößinger, H.; Schlaak, H.F.: Modelling and characterization of dielectric elastomer stack actuators. In: Smart Materials and Structures 22 (2013) 10, p. 104009.
[31] Kovacs, G.; Düring, L.; Michel, S.; Terrasi, G.: Stacked dielectric elastomer actuator for tensile force transmission. In: Sensors and Actuators A: Physical 155 (2009) 2, pp. 299- 307.
[32] Hau, S.; Bruch, D.; Rizzello, G.; Motzki, P.; Seelecke, S.: Silicone based dielectric elastomer strip actuators coupled with non-linear biasing elements for large actuation strains. In: Smart Materials and Structures 27 (2018) 7, p. 074003. [33] Hau, S.; York, A.; Seelecke, S.: High-Force Dielectric Electro-active Polymer (DEAP) mem- brane actuator. In: Bar-Cohen, Y; Vidal, F. (ed): Proceedings SPIE 9798, Electroactive Polymer Actuators and Devices (EAPAD). Las Vegas, NV 2016.
[34] Rizzello, G.; Naso, D.; York, A.; Seelecke, S.: Closed loop control of dielectric elastomer actuators based on self-sensing displacement feedback. In: Smart Materials and Structures 25 (2016) 3. S. 035034.
[35] Rosset, S.; O’Brien, B. M.; Gisby, T.; Xu, D.; Shea, H. R.; Anderson, I. A.: Self-sensing dielectric elastomer actuators in closed-loop operation. In: Smart Materials and Structures 22 (2013) 10, p. 104018.
[36] Rosset, S.; de Saint-Aubin, C.; Poulin, A.; Shea, H. R.: Assessing the degradation of compliant electrodes for soft actuators. In: Review of Scientific Instruments 88 (2017) 10, p. 105002.
[37] Hill, M.; Rizzello, G.; Seelecke, S.: Development of a fatigue testing setup for dielectric elastomer membrane actuators. In: Conference: SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring. Portland, OR 2017.
[38] Matysek, M.; Lotz, P.; Schlaak, H.: Lifetime investigation of dielectric elastomer stack ac- tuators. In: IEEE Transactions on Dielectrics and Electrical Insulation 18 (2011) 1, pp. 89-96.
[39] Optotune, “Products”. URL: www.optotune.com/products, accessed March 1, 2018.
[40] Giousouf, M.; Kovacs, G.: Dielectric Elastomer Actuators Used for Pneumatic Valve Technology. In: Smart Materials and Structures, 22 (2013), pp. 104010-6. DOI: 10.1088/0964-1726/22/10/104010.
[41] Hill, M.; Rizzello, G.; Seelecke, S.: Development and experimental characterization of a pneumatic valve actuated by a dielectric elastomer membrane. In: Smart Materials and Structures 26 (2017) 8, p. 085023.
[42] Bonci, A.; Longhi, S.; Pirani, M.; Lorenzoni, E.; Rizzello, G.; Naso, D.; Seelecke, S.: Simulation Analysis and Performance Evaluation of a Vibratory Feeder Actuated by Dielectric Elastomers. In: The 14th IEEE/ ASME International Conference on Mechatronic and Embedded Systems and Applications. Oulu, Finnland 2018.