


Towards Human-Centered Industrial AI Adoption |
A reference architecture for machine vision demonstrators
| Journal | Industry 4.0 Science |
| Issue | Volume 41, 2025, Edition 5, Pages 152-160 |
| Open Access | https://doi.org/10.30844/I4SE.25.5.146 |
| Bibliography | Share | Cite | Download |
Abstract
Keywords
Article
Understanding, applying, and transferring artificial intelligence
Artificial intelligence (AI) is widely regarded as a key technology for industrial transformation. Machine vision applications, in particular, offer significant potential for automation and process optimization in industrial production [1]. However, a recent study by Fraunhofer ISI indicates that AI is currently used productively in only around 16% of manufacturing companies in Germany [2].
This limited adoption is often attributed to perceived complexity, such as AI functions that are difficult to understand, a lack of technical expertise, or uncertainty about how to implement AI applications [3]. In addition, internal resistance to AI integration in companies is triggered, for example, by fears of job losses or concerns about relinquishing control over existing processes [4].
A human-centered approach can help to reduce internal resistance by involving employees in development and design processes at an early stage [5]. Initial small-scale implementation projects can further promote acceptance of AI within the company, gradually familiarizing employees with practical AI technologies and thereby significantly accelerating broader adoption [2].
This article presents a modular reference architecture for AI demonstrators based on cost-effective hardware and open-source components. The aim is to facilitate access to AI technologies through a clear and easily understandable machine vision application, reduce reservations, and build specific skills in a protected learning environment. A didactically structured approach enables companies to independently transfer knowledge to their own processes and use cases. Using a design science research approach, both the technical architecture and an accompanying didactic framework are developed and evaluated in three real-world application scenarios.
Demonstrators for the human-centered introduction of artificial intelligence
In the context of organizational transformation, such as the introduction of AI, experience-based learning is becoming increasingly important [6]. Kolb’s learning cycle [7] provides a well-established model for this, describing learning as a process with cyclical phases. According to this model, sustainable learning emerges from independent experience, reflection, and gradual abstraction [8]. Applied to the introduction of AI in companies, this implies that employees achieve a deeper understanding of data-driven systems by complementing theoretical knowledge of their functionality with practical testing and reflection.
Complex technologies such as AI are often perceived as a “black box” when there is little transparency about how they function [9]. Experience-based learning can help reduce uncertainty in dealing with AI and overcome technological and cognitive barriers [10]. In practice, however, businesses often lack the necessary space for such learning processes. Pressure to be efficient, limited human resources, and insufficient freedom can hinder systematic experimentation [11].
Demonstrators play a central role in technology development. They are not only technical artifacts but also act as bridges between theory and application [12]. As functional models, they make technological concepts tangible in concrete, often simplified application scenarios. They serve to visualize functional principles, validate concepts, and facilitate communication in innovation processes, especially in the early stages of development [13].
Demonstrators are becoming increasingly important in the context of AI applications. They not only make the complex functioning of AI algorithms easier to understand but also create tangible use cases. Werheid et al. [14] present an example of a portable, low-cost computer vision system for error detection and inventory management that was implemented using open-source software and transfer learning. The evaluation of this demonstrator further indicates that such systems can reduce entry barriers and foster trust in AI.
However, many existing demonstrators are limited to predefined use cases without giving users the opportunity to address their own problems. As a result, the knowledge gained often remains superficial [15], which restricts the development of deeper competencies. In addition, interactive didactic design is frequently neglected, even though a structured learning approach could effectively promote sustainable competence building [16]. In line with a human-centered introduction to AI, it is therefore essential that employees not only accept AI systems but also actively understand, critically reflect on, and help shape them [17]. Demonstrators should thus go beyond serving as mere proofs of concept and instead be designed as interactive, didactically grounded learning environments.
Designing a reference architecture using the design science research approach
This article adopts a human-centered perspective and presents a reference architecture for machine vision demonstrators that support exploratory, reflective, and participatory learning during AI implementation. To develop a practical solution, the Design Science Research (DSR) process model according to Vaishnavi and Kuechler [18] was applied. DSR enables the iterative development of innovative artifacts through problem analysis, development, and evaluation and is particularly suitable for design-oriented research [19].
In the problem awareness phase, an in-depth analysis was conducted to identify existing barriers, such as insufficient domain understanding, uncertainty in handling data-driven systems, and a lack of acceptance. Based on these insights, requirements for a reference architecture and contextual conditions were derived. The suggestion phase emphasized the conceptual development of a solution approach.
The reference architecture for industrial AI systems according to Oks et al. [20] provided the structural framework. In addition, an application procedure based on Kolb [7] was developed to promote independent learning experiences with AI. In the development phase, three prototype configurations of the reference architecture were prototypically realized according to the CRISP-DM model [21], integrating digital and physical components to address different use cases.
The evaluation phase aimed to examine the effectiveness of the approach in realistic usage scenarios, guided by criteria such as observable learning processes, user feedback, and integration into operational settings. The concluding phase involved reflection on both theoretical and practical implications. The results from the developed reference architecture and its didactic application aim to contribute to further research and stimulate practical implementation.
Concept and implementation of the reference architecture
The proposed reference architecture (Figure 1) aims to provide a low-threshold environment for learning and experimentation with AI applications in a corporate setting. The focus is on technical simplicity, intuitive usability for users without prior knowledge, and immediate operational applicability.
![Figure 1: Concept of the reference architecture for machine vision demonstrators (illustration based on Oks et al. [20]), Human-Centered](https://industry-science.com/wp-content/uploads/2025/09/Arnold_Figure1-1024x848.png)
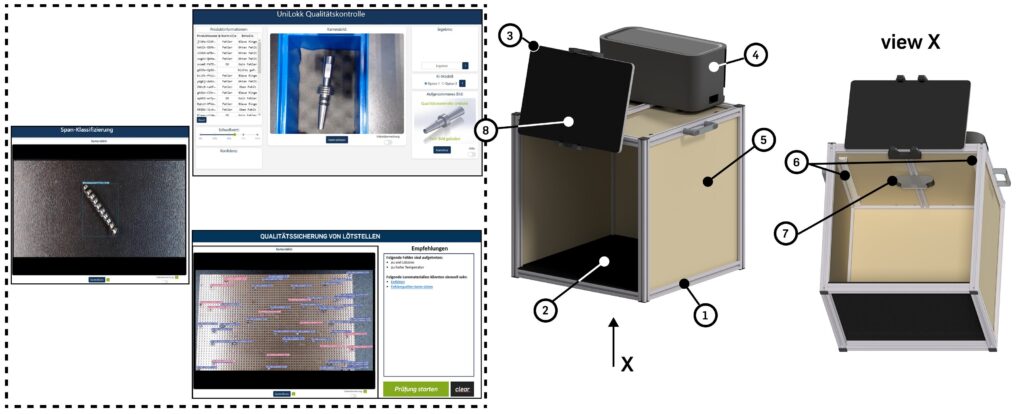
The reference architecture is reflected not only in concept (Figure 1) but also in its implementation (Figure 2). The physical structure consists of a compact support frame (1) with an integrated power supply (4) that powers all system components and is equipped with a light-shielding cover (5). This cover protects against external interference and can also be used for marketing purposes. A centrally mounted optical sensor (7), implemented as a standard webcam, enables image capture under standardized lighting conditions, aided by an integrated active light source (6).
The object support (2) is height-adjustable, allowing optimization of the distance to the optical sensor to improve image quality and focusing depending on the use case. A tablet PC (3) functions as the human-machine interface (HMI), facilitating image capture and interaction with the evaluation software (8). The YOLO algorithm provides real-time object classification [22] and constitutes the functional core of the AI application. All hardware is mobile and can therefore also be used outside of factory halls, for example at trade fairs or in training courses.
The architecture is modular: components such as cameras, lighting, and carrier frames can be easily replaced, expanded, and adapted to the respective application context. The software is tailored to specific use cases of stakeholder groups in participatory, moderated CRISP-DM workshops [21]. In these workshops, users define domain-specific requirements, foster acceptance of the technology, and strengthen their design and problem-solving skills in working with AI.
Didactic support for the introduction of artificial intelligence
A central goal of this article is to ensure that the introduction of AI systems is human-centered. This requires more than just functional technologies. Users must be actively involved in learning and design processes. Independent experimentation, modification, and application are key to developing not only technical skills but also trust and systemic understanding. To support this, a didactic orientation framework.
The theoretical foundation is Kolb’s learning cycle [7], which describes learning as a four-phase process: concrete experience, reflective observation, abstract conceptualization, and active experimentation. In the context of industrial AI implementation, however, this cycle reaches its limits due to the separation between the context (demonstrator) and the application context (practice). To address this, Kolb’s learning cycle is extended into three interlocking cycles (Figure 3):
- Learning in practice: Employees gain experience in everyday work, reflect on it, abstract insights, and derive new patterns of action. There are certain limitations due to restricted freedom of experimentation.
- Learning with the demonstrator: In a protected environment, problems from practice can be tested and reflected upon without risk. The demonstrator thus functions as a technical learning laboratory.
- Transfer cycle: Insights from one cycle are reflected upon metacognitively and transferred to another, creating a dynamic learning spiral that interlinks technical and didactic development.
![Figure 3: Circular learning process and exemplary application paths in the interaction between practice and demonstrator (based on Kolb's learning cycle [7])](https://industry-science.com/wp-content/uploads/2025/09/Arnold_Figure3-1024x432.png)
Configuring the reference architecture
The applicability of the developed reference architecture is demonstrated through three practical application scenarios (A, B, C). The phases of the learning cycles are also shown in Figure 3.
In the first use case, the demonstrator is used for visual quality inspection of an assembly component. In this case, the component is an adjustable bottle cap that is often prone to faulty assembly. The goal was to implement an automated, consistent error classification system to support manual inspection processes.
In accordance with the CRISP-DM model [21], relevant error classes were identified in collaboration with technical staff, and corresponding image data was generated and manually annotated. In the initial development phase, the evaluation software was already able to identify missing components reliably. Subsequent testing, however, revealed the need to also account for incorrectly assembled components. The model was then expanded to include additional classes. No modifications to the physical structure or hardware were required, in accordance with the outlined concept. Notably, the successful transfer to the real production environment is particularly noteworthy: the software was integrated into an existing line and supplemented with operational order data, allowing for a target-actual comparison of the product configuration.
The first use case demonstrates that the developed reference architecture is both technically compatible and adaptable to operational processes. The successful integration of the software component into a real production environment proves its potential for independent transfer to company-specific use cases. In addition, the iterative development process highlights the didactic added value of the demonstrator as a learning-oriented space for experimentation.
The second use case concerns the AI-supported optimization of machining cutting processes. The goal was to establish a data-driven basis for adjusting cutting parameters through optical chip analysis. Specifically, chips were classified to derive recommendations for feed rate, cutting depth, and rotational speed.
Following the CRISP-DM model, chip shapes were specifically generated, documented, and annotated based on established typologies [23]. Combined with domain-specific expertise, the material was used to train the evaluation software. Initial tests confirmed basic functionality but also revealed technical limitations: the frame rate and image quality of the standard optical sensor limit the software’s effectiveness at high process speeds. These limitations require further adjustments to the demonstrator before it can be applied reliably under real-world process conditions.
Overall, the second use case confirms the suitability of the developed reference architecture as a domain-specific learning and experimentation environment. While the combination of optical data acquisition, domain-focused annotation, and CRISP-DM methodology enabled basic functionalities with minimal effort, the identified technical limitations underscore the importance of the architecture’s modular adaptability.
The third use case addresses operational training in mechatronics, with the aim of supporting learning processes through an AI-supported feedback system for evaluating soldered joints. Traditionally, this evaluation is carried out directly by trainers. In large cohorts, however, testing opportunities are limited. The use of digital assistants for independent testing can help overcome potential barriers.
Based on the reference architecture, a demonstrator was developed to automatically classify fault patterns such as “cold solder joints” or “bridging.” For this purpose, real solder joints were created both correctly and incorrectly, photographed, and annotated according to recognized criteria (e.g., IPC-A-610). Unlike classical automation applications, the focus here is not on efficiency but on supporting the learning process of trainees. The demonstrator thus forms the foundation for a didactically designed learning environment.
The third use case highlights the potential of the developed reference architecture for designing didactically meaningful learning environments. The solder joint evaluation demonstrator illustrates how AI-based machine vision systems can provide not only technical functionality but also educational value. By offering immediate feedback, it enables an interactive and metacognitively beneficial learning process, fostering engagement with AI and the acquisition of domain-specific skills.
Discussion and summary of the results
This article addresses the gap between technological potential and real-world application, which remains a key obstacle to the industrial adoption of AI.
A practical solution was developed in the form of a modular reference architecture for AI demonstrators in the field of machine vision. The architecture is characterized by ease of use, mobility, expandability, and didactic openness. Three prototypical use cases — quality inspection, chip analysis, and operational training — demonstrated both the technical functionality and transferability of the architecture. While the proposed reference architecture may not be immediately suitable for every use case, its modular design allows for flexible adaptation to specific requirements, such as different dimensions, varied technical equipment, or the integration of additional functions and components.
The didactic support is based on multiple learning cycles according to Kolb [7], enabling both learning in practice and learning with the demonstrator. This structured approach promotes not only knowledge acquisition but also user acceptance and active co-design of the technology.
At the same time, there are several limitations. The evaluation was qualitative and context-specific, and broader empirical validation remains pending. In addition, the transferability of the concept to dynamic processes required further examination. These limitations have relevant implications for further research: impact analyses should be based on larger data sets, and the platform should be expanded to include industry-specific functionalities. Integration into digital learning environments, for example via learning platforms or digital twins, also offers significant potential. Overall, this article supports a human-centered approach to introducing AI. The results integrate technical demonstration with didactic considerations, providing a framework for participatory, experience-based learning in the context of the digital transformation of the workplace.
The authors declare that they have received financial support for the research, authorship, and publication of this article. This work was carried out as part of the HUMAINE Competence Center, funded by the German Federal Ministry of Research, Technology, and Space (BMFTR) as part of the program “Future of Value Creation – Research on Production, Services, and Work” and is supported by the Project Management Agency Karlsruhe (PTKA) (grant number: 02L19C200). In addition, the authors would like to express their sincere thanks to Simon Weingarten, Henning Oberc, Tom Nowak, Tobias Moser, Marius Knott, and Tobias Schmelter for their significant contributions to the development and continuous refinement of the initial elaboration of the demonstrators presented in this paper.
The original German version of this article can be accessed via DOI: 10.30844/I4SD.25.5.152
Bibliography
[1] Fahle, S.; Prinz, C.; Kuhlenkötter, B.: Systematic review on machine learning (ML) methods for manufacturing processes – Identifying artificial intelligence (AI) methods for field application. In: Procedia CIRP – 53rd CIRP Conference on Manufacturing Systems (2020), pp. 413–418.[2 Heimberger, H.; Jäger, A.; Maloča, S.: Künstliche Intelligenz in der Produktion (2024).
[3] Oldemeyer, L.; Jede, A.; Teuteberg, F.: Investigation of artificial intelligence in SMEs: a systematic review of the state of the art and the main implementation challenges. In: Management Review Quarterly (2024), pp. 1-43.
[4] Golgeci, I.; Ritala, P.; Arslan, A.; McKenna, B.; Ali, I.: Confronting and alleviating AI resistance in the workplace: An integrative review and a process framework. In: Human Resource Management Review 35 (2025) 2, pp. 1-18.
[5] Berretta, S.; Tausch, A.; Kluge, A.; Peifer, C.: The Job Perception Inventory: considering human factors and needs in the design of human-AI work. In: Frontiers in psychology 14 (2023), pp. 1–25.
[6] Sahni, R.; Chilton, L. B.: Beyond Training: Social Dynamics of AI Adoption in Industry (2025), pp. 1-10.
[7] Kolb, D. A.: Experimental learning. Experience as the source of learning and development. Englewood Cliffs, N.J. 1984.
[8] Kolb, A. Y.; Kolb, D. A.: Learning Styles and Learning Spaces: Enhancing Experiential Learning in Higher Education. In: Academy of Management Learning & Education 4 (2005) 2, pp. 193–212.
[9] von Eschenbach, W. J.: Transparency and the Black Box Problem: Why We Do Not Trust AI. In: Philosophy & Technology 34 (2021) 4, pp. 1607–1622.
[10] Capelo, C.; Silva, A. L.: Optimising the Learning Potential of Simulations Through Structural Transparency and Exploratory Guidance. In: Simulation & Gaming 51 (2020) 4, pp. 498–523.
[11] Baabdullah, A. M.: The precursors of AI adoption in business: Towards an efficient decision-making and functional performance. In: International Journal of Information Management 75 (2024), pp. 1-26.
[12] Bobbe, T.; Opeskin, L.; Lüneburg, L.-M.; Wanta, H.; Pohlmann, J.; Krzywinski, J.: Design for communication: how do demonstrators demonstrate technology? In: Design Science 9 (2023), pp. 1–25.
[13] Moultrie, J.: Understanding and classifying the role of design demonstrators in scientific exploration. In: Technovation 43-44 (2015), pp. 1–16.
[14] Werheid, J.; Münker, S.; Klasen, N.; Hamann, T.; Abdelrazeq, A.; Schmitt, R. H.: Demonstrating computer vision to small- and medium-sized enterprises in manufacturing: Toward overcoming costs and implementation challenges. In: Engineering Reports 6 (2024) 11, pp. 1-12.
[15] Grabinger, R. S.; Dunlap, J. C.: Rich environments for active learning: a definition. In: Research in Learning Technology 3 (1995) 2, pp. 5-34.
[16] Abele, E.; Chryssolouris, G.; Sihn, W.; Metternich, J.; ElMaraghy, H.; Seliger, G.; Sivard, G.; ElMaraghy, W.; Hummel, V.; Tisch, M.; Seifermann, S.: Learning factories for future-oriented research and education in manufacturing. In: CIRP Annals 66 (2017) 2, pp. 803–826.
[17] Haipeter, T.; Wannöffel, M.; Daus, J.-T.; Schaffarczik, S.: Human-centered AI through employee participation. In: Frontiers in artificial intelligence 7 (2024), pp. 1-13.
[18] Vaishnavi, V.; Kuechler, W.: Design science research methods and patterns. Innovating information and communication technology, Second edition. Boca Raton 2015.
[19] Gregor, S.; Hevner, A. R.: Positioning and Presenting Design Science Research for Maximum Impact. In: MIS Quarterly 37 (2013) 2, pp. 337–355.
[20] Oks, S. J.; Jalowski, M.; Fritzsche, A.; Möslein, K. M.: Cyber-physical modeling and simulation: A reference architecture for designing demonstrators for industrial cyber-physical systems. In: Procedia CIRP 84 (2019), pp. 257–264.
[21] Shearer, C.: The CRISP-DM model: the new blueprint for data mining. In: Journal of data warehousing 5 (2000) 4, pp. 13–22.
[22] Lee, J.; Hwang, K.: YOLO with adaptive frame control for real-time object detection applications. In: Multimedia Tools and Applications 81 (2022) 25, pp. 36375–36396.
[23] Abdelnasser, E.; El-Sanabary, S.; Nassef, A.; Barakat, A.; Elkaseer, A.: Influence of Technological Parameters on Chip Formation and Chip Control in Precision Hard Turning of Ti-6Al-4V. In: Micromachines 14 (2023) 10, pp. 1–19.





