

Künstliche Muskeln und Nerven in Industrie 4.0-Konzepten |
Multifunktionale Aktor-Sensor-Systeme mit Formgedächtnislegierungen und dielektrischen Elastomeren
| Zeitschrift | Industrie 4.0 Management |
| Ausgabe | 34. Jahrgang, 2018, Ausgabe 4, Seite 38-42 |
| Open Access | https://doi.org/10.30844/I40M18-4_38-41 |
| Literatur | Teilen | Zitieren | Download |
Abstract
Keywords
Artikel
Als intelligente Materialien oder Smart Materials werden Materialien bezeichnet, die aktorische Eigenschaften vorweisen und gleichzeitig als (ihr eigener) Sensor betrieben werden können. Dazu gehören unter anderem piezoelektrische Aktoren, thermische und magnetische Formgedächtnislegierungen sowie dielektrische Elastomere, welche eine wichtige Untergruppe der elektroaktiven Polymere (EAP) darstellen.
In Analogie zum menschlichen Körper werden FGL-Drähte und dielektrische Elastomeraktoren (DEA) wegen ihrer aktorischen Eigenschaften auch als künstliche Muskeln (engl.: artificial muscles) bezeichnet. Die speziellen und flexiblen Formfaktoren dieser Aktoren ermöglichen die Umsetzung von bisher nicht möglich gewesenen Antriebskonzepten und gleichzeitig können ihre sensorischen Eigenschaften wie Nerven zur Generierung zusätzlicher Informationen genutzt werden („Self-Sensing“).
Thermische Formgedächtnislegierungen (FGL)
Thermische Formgedächtnislegierungen (engl.: shape memory alloys, SMA) können sich an eine eingeprägte geometrische Gestalt „erinnern“ und selbst nach starken Deformationen zu ihrer ursprünglichen Form zurückkehren. Diese Fähigkeit basiert auf einer reversiblen Phasenumwandlung durch den thermischen Formgedächtniseffekt [1]. Bei der Phasenumwandlung, welche durch Temperatur und mechanische Spannung induziert wird, handelt es sich um eine Umwandlung zwischen einer Hochtemperaturphase, dem Austenit, und der als Martensit bezeichneten Tieftemperaturphase [2].
Zur Umsetzung von Aktorikkonzepten werden vorwiegend FGL-Drähte aus Nickel-Titan (NiTi, Nitinol) genutzt. Diese müssen in ihrem kalten Zustand von einer Gegenkraft, zumeist durch eine Feder oder einen weiteren FGL-Draht gedehnt werden. Durch Bestromen werden die Drähte erwärmt und die Phasentransformation führt, im Gegensatz zur weitläufig bekannten thermischen Ausdehnung, zu einer Kontraktion, welche technisch zu aktorischen Zwecken genutzt werden kann. Die typischen kommerziell verfügbaren FGL-Drähte haben eine Phasenumwandlungstemperatur von 90 °C und produzieren Hübe von 4-5 % der Drahtlänge [3, 4]. Beim Abkühlen der Drähte macht sich eine Temperaturhysterese von 20-40 K bemerkbar, sodass die anschließende Dehnung bei Temperaturen zwischen 70-50 °C stattfindet. Dabei besitzen FGL-Drähte die höchste Energiedichte aller bekannten Aktormechanismen in der Größenordnung 107 J/m3 [5, 6].
Die tatsächlich erzeugbaren Kräfte hängen vom Drahtdurchmesser ab. Die derzeit kommerziell verfügbaren Drahtdurchmesser liegen in einem Bereich zwischen 25-500 µm. Der stärkste Draht mit einem Durchmesser von 500 µm kann beispielsweise eine Kraft von ca. 50 N (250 MPa) erzeugen, allerdings können dicke Drähte nicht bei hohen Frequenzen betrieben werden. Die Betriebsfrequenz von FGL-Drähten hängt im Wesentlichen von der Abkühlzeit der Drähte ab und dickere Drähte kühlen aufgrund ihres Oberflächen-Volumen-Verhältnisses langsamer ab. Für schnelle Einmalanwendungen, z. B. bei Bremsen oder Entriegelungsmechanismen, ist die Aktivierung von selbst dickeren FGL-Drähten hingegen im ms-Bereich möglich [7, 8]. Mit den dünnsten FGL-Drähten (25 µm Durchmesser) können sogar im zyklischen Betrieb Frequenzen von 20-30 Hz erreicht werden [4].
Ein Kompromiss zwischen hohen Kräften und gleichzeitig ausreichender Betriebsfrequenz wird oftmals durch eine mechanische Parallelschaltung mehrerer dünner FGL-Drähte erreicht. Die mechanische Ermüdung hängt von der maximalen Dehnung und den maximalen Spannungen im Draht ab und bei entsprechender Auslegung können FGL-Drähte auch Zyklenzahlen im höheren Millionen-Bereich erreichen.
Die sensorischen Eigenschaften der FGL-Drähte beruhen auf einer Änderung des elektrischen Widerstands in Abhängigkeit der Drahtdehnung. Im Gegensatz zum mechanischen Spannungs-Dehnungsverhalten ist das Widerstands-Dehnungsverhalten nicht hysteresebehaftet und nahezu linear. Diese Tatsache ermöglicht ein direktes Feedback über den Dehnungszustand des Drahts, was beispielsweise auch für die proportionale Ansteuerung genutzt werden kann. Zusätzlich können über die Auswertung des Widerstandssignals Schäden und Ermüdungserscheinungen frühzeitig erkannt werden. Der Self-Sensing Effekt spielt somit eine wichtige Rolle unter den Gesichtspunkten „Predictive Maintenance“ und „Condition Monitoring“.
Aufgrund der genannten Vorteile sind FGL schon seit Jahren Kernthemen von Forschungseinrichtungen (Fraunhofer IWU, Ruhr-Universität Bochum, FH-Konstanz, Universität des Saarlandes) und einige FGL-basierte Produkte haben sich am Markt etabliert. Hervorzuheben ist die Firma Actuator Solutions GmbH (ASG), welche sich auf die Massenproduktion von FGL-Aktoren spezialisiert hat. In ihrem derzeitigen Produktportfolio befinden sich verschiedene Miniaturkameramodule sowie unterschiedliche Pneumatik- und Fluidventile. Durch vollautomatisierte Anlagen produziert ASG mittlerweile mehr als 10 Millionen Aktuatoren pro Jahr mit einer Lebensdauer von über 1 Million Zyklen. In den vergangenen Jahren wurden so über 100 Millionen ASG Aktuatoren ins Feld gebracht [9, 10].
Im Rahmen der Bestrebungen von Industrie 4.0 treten für die FGL-Technologie speziell auch die Aspekte Energieeffizienz und Self-Sensing in den Vordergrund [11]. In Produktionsanlagen existiert häufig eine große Zahl von meist pneumatisch betriebenen Linearantrieben. Die dazu nötige Druckluftversorgung stellt nicht selten einen der größten Kostenfaktoren dar. Einsparungen in Energieverbrauch, Gewicht und Bauraum sowie die inhärenten sensorischen Eigenschaften zur Generierung zusätzlicher Informationen machen die FGL-Technologie zu einer attraktiven Alternative zu konventionellen Antrieben.
Neben einfachen Lineartrieben finden FGL-Drähte auch Anwendung in speziellen Applikationen der Greif- und Handhabungstechnologie. Die Firma FFZ-Glashütte vertreibt beispielsweise seit einigen Jahren Mikrogreifer auf FGL-Basis.
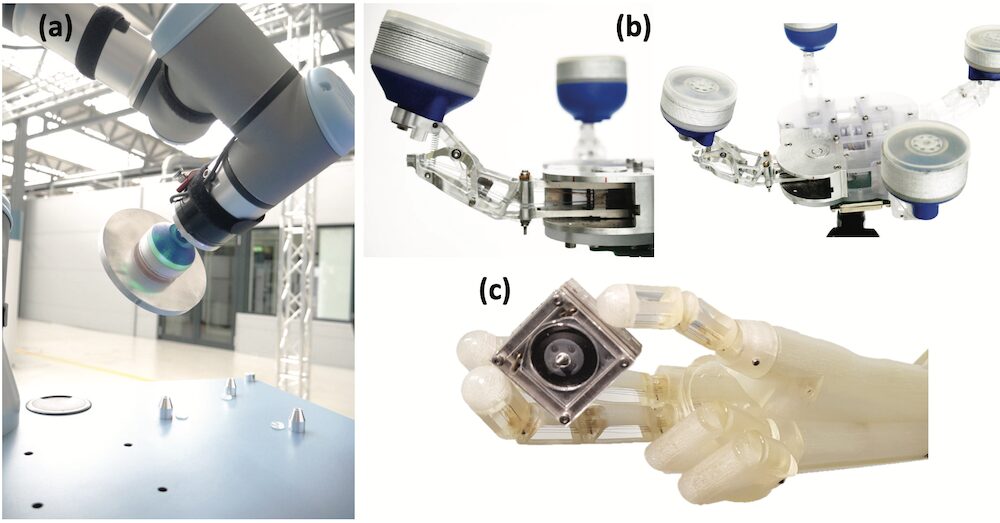
Als erstes Applikationsbeispiel aus der Forschung dient ein FGL betriebener Vakuum-Sauggreifer (Bild 1a). Vakuumsaugreifer sind sehr verbreitet zur Handhabung von Bauteilen mit glatter Oberfläche und basieren auf Vakuumerzeugung durch kontinuierliche Druckluftversorgung (Venturi-Prinzip). Der FGL-basierte Sauggreifer nutzt ein bistabiles FGL-Aktorelement [12, 13], sodass während der Haltephasen keine Energie benötigt wird. Lediglich zum Greifen und Loslassen der Bauteile wird ein kurzer Strompuls benötigt. Durch eine antagonistische FGL-Draht Konfiguration sind zudem hohe Schaltfrequenzen für Pick & Place Aufgaben möglich. Der gezeigte Sauger ist ausgelegt für eine Traglast von 2 kg und die integrierte Elektronik nutzt die Self-Sensing Eigenschaften der FGL-Drähte zur Überwachung des Vakuums [14].
Ein weiteres Applikationsfeld aus dem Handhabungs- und Montagebereich sind zukünftige, rekonfigurierbare Endeffektoren. Endeffektoren zur Handhabung von flächigen Bauteilen werden auf spezielle Bauteilgeometrien ausgelegt. Die automatische Rekonfiguration eines Endeffektors ermöglicht die Anpassung einer Montagelinie an unterschiedliche Bauteilformen ohne den Austausch des kompletten Endeffektors und ohne damit zusammenhängendem Produktionsstop. Aufgrund der hohen Energiedichte von FGL-Drähten ist das Einbringen von Aktorik ohne zusätzliches Gewicht möglich, sodass bei den hohen Beschleunigungen von Prozessrobotern keine zusätzliche Trägheit entsteht.
Der gezeigte Endeffektor-Prototyp (Bild 1b) besitzt vier unabhängige Greifarme mit je zwei Freiheitsgraden, welche eine 90° Rotation in der Ebene und eine 30° Rotation aus der Ebene heraus ermöglichen [15]. Das Widerstandssignal der FGL-Drähte wird neben einer Zustandsüberwachung für die Positionsregelung der Greifarme auf beliebige Winkel innerhalb ihrer Rotationsradien genutzt.
Der in Bild 1c dargestellte bio-inspirierte Drei-Finger-Greifer ist eine weitere mögliche Applikation sowohl in der Industrie als auch im Bereich der Bio-Medizin. Die FGL-Drähte werden hier wie Muskeln im menschlichen Körper in einer antagonistischen Konfiguration genutzt, um die einzelnen Fingerglieder unabhängig voneinander zu bewegen [16]. Auch hier wird Self-Sensing verwendet um die Kontraktion der Drähte und die daraus resultierende Fingerbewegung zu kontrollieren. Zusätzlich ist die Regelung der Greifkraft über eine Auswertung der Leistungsaufnahme der FGL-Drähte möglich.
Dielektrische Elastomere
Dielektrische Elastomere (DE) bestehen im einfachsten Fall aus einer dünnen (typischerweise 20-100 µm) Elastomerfolie, die beidseitig mit einer hauchdünnen (< 5 µm), leitfähigen und dehnbaren Elektrode beschichtet ist. Somit bilden sie einen flexiblen und dehnfähigen Kondensator. Als Materialien für das Elastomer werden je nach Anwendung Silikone, Acrylate, Polyurethane oder Naturkautschuk verwendet. Die Elektroden bestehen i. d. R. aus einer Mischung von Industrieruß und dem verwendeten Basiselastomer.
Diese günstigen Materialien ebenso wie der Verzicht auf Seltene Erden bieten bereits einen großen Kosten- und Ressourcenvorteil. Des Weiteren erlaubt der einfache Aufbau, kombiniert mit industriellen Massenproduktionsverfahren (wie z. B. Siebdruck) die Herstellung kostengünstiger Sensoren, Aktoren und Generatoren für die Verwendung in kleinen, leichten und energieeffizienten Systemen [17, 18].
Im Sensorbetrieb werden DE durch eine äußere Kraft verformt bzw. gedehnt. Dies sorgt für eine Kapazitätsänderung, welche als Messsignal dient. Solche Sensoren können problemlos Dehnungen von über 100 % mit einer Auflösung kleiner 0,1 % (Sensitivität 0,026 %) erreichen, wie es Beispiele der Firma Parker für industrielle Anwendungen [19] oder der Firma StretchSense für die Erkennung von Bewegungsabläufen zeigen [20].
Des Weiteren eignen sich solche Sensoren auch zur Druckmessung [21]. Bei der Nutzung von DE als Generator müssen diese im gedehnten Zustand mit einer Hochspannung geladen werden. Durch eine anschließende Relaxation des DE wird die in der Dehnung gespeicherte mechanische Energie in elektrische umgewandelt [22-24]. Die Energieerzeugung aus menschlicher Bewegung, Wind- und Industrievibrationen, aber auch großtechnische Meereswellenenergiegewinnung sind hierbei Gegenstand der Forschung.
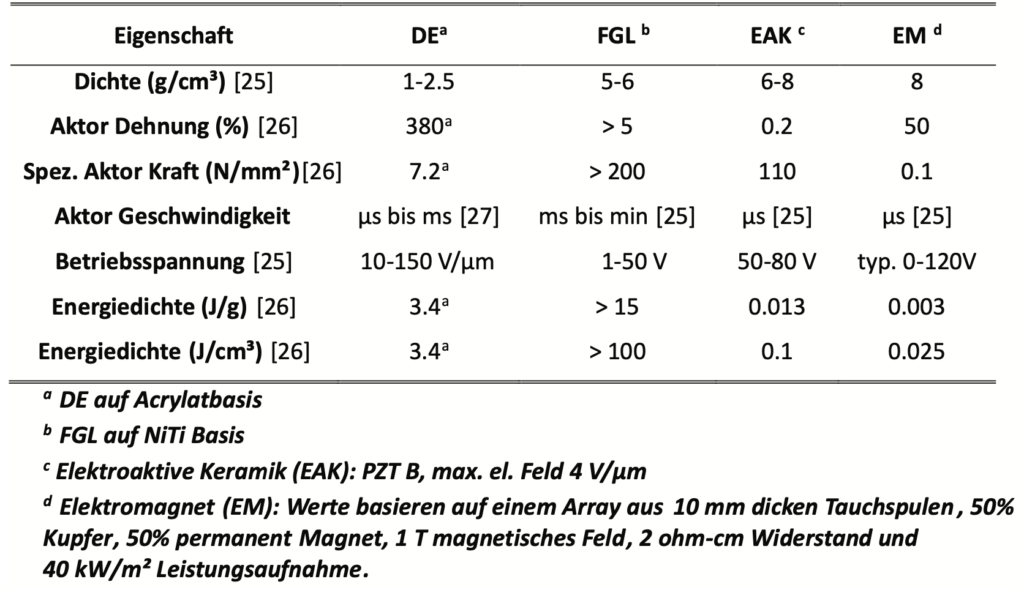
Energy Harvesting Konzepte auf der Basis von DE können aber genauso gut auf kleinskalige Systeme übertragen werden, um somit die Versorgung energieautarker Sensorsysteme sicherzustellen. Besonders interessant ist die Anwendung von DE für leichte, schnelle (kHz-Bereich) und energieeffiziente Aktoren mit sehr hohen Dehnungsraten, wie der Vergleich mit anderen Aktorprinzipien in Bild 2 zeigt.
Legt man ein elektrisches Feld (typischerweise 50-100 V/µm) an den DE, führt die elektrostatische Anziehung der entgegengesetzten Ladungen auf den beiden Elektroden zu einer Dick-enkompression des Elastomers, sowie einer Ausdehnung in der Fläche. Hierbei bestimmt die Aktorbauform welche Geometrieänderung maßgeblich für die Bewegungserzeugung genutzt wird. Daher unterscheidet man Stapel- und Membranaktoren. Stapelaktoren bestehen typischerweise aus mehreren Hundert DE Lagen (ähnlich einem Piezoaktor) und nutzen die Dickenänderung zur Erzeugung hoher Kräfte im zweistelligen Newtonbereich bei moderaten Dehnungen von ca. 10 % der Ausgangslänge [28-30].
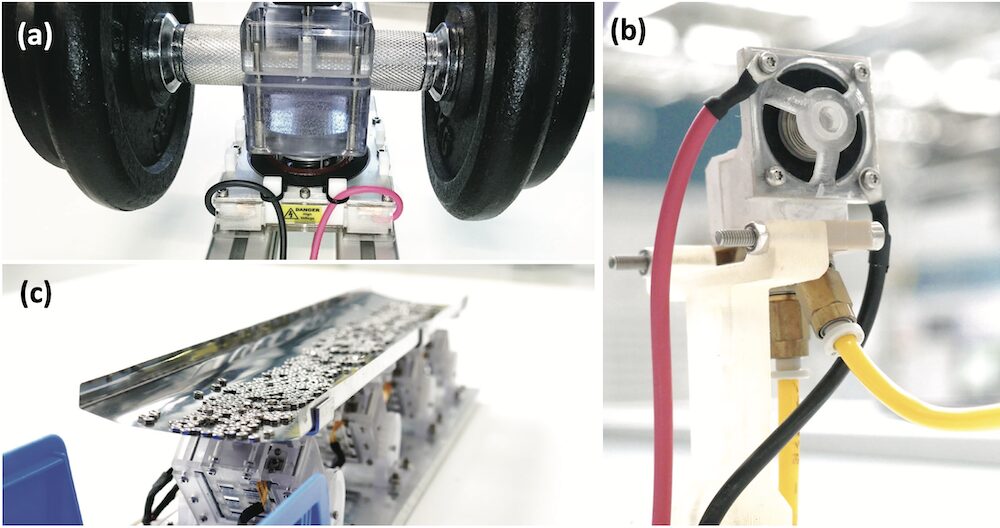
Membranaktoren hingegen nutzen die Flächenausdehnung zur Aktorik. Dies erlaubt das generieren von Dehnungen > 100 %, wobei die Kräfte eher im niedrigen einstelligen Newtonbereich liegen. Bei beiden Bauformen können sowohl Hub als auch Kraft über die Aktorgeometrie skaliert werden [31]. Zudem lassen sich Membranaktoren auch stapeln um größere Kräfte zu erzeugen. Mit diesem Mischkonzept können Kräfte von über 100 N erzeugt werden (Bild 3a) [32].
Von besonderer Bedeutung für potenzielle Industrie 4.0-Anwendungen ist die kombinierte Ausnutzung von Aktor und Sensoreffekt. Hierbei wird während der Aktuierung permanent auch die Kapazität des DEA ausgelesen. Somit zeigen DEA ähnlich den FGL-Aktoren einen Self-Sensing Effekt, womit sich intelligente und regelbare Aktorsysteme aufbauen lassen, die keine zusätzliche Sensorik benötigen. Hierbei kann eine Positionsgenauigkeit < 5 % für dynamische [33] und < 1 % für quasistatische Bewegungen erreicht werden [34]. Des Weiteren eignet sich eine zusätzliche Messung des Elektrodenwiderstands, um Aussagen über die Alterung des DEA zu treffen [35]. Die Themen Alterung und Lebensdauer sind auch Gegenstand aktueller Forschung [36]. Erste Untersuchungen haben bereits gezeigt, dass DEA mehrere Millionen Betriebszyklen unbeschadet überstehen können [37].
Die Zahl der kommerziell verfügbaren Produkte ist z. Z. noch relativ gering und beschränkt sich auf oben genannte Sensoren sowie Aktoranwendungen im Bereich adaptiver Optik von der Firma Optotune [38]. Dies ist unter anderem dem noch geringen Alter (erste Forschungsarbeiten in den 1990er Jahren) der Technologie geschuldet. Jedoch hat die industrienahe Forschung in den letzten Jahren einige vielversprechende Anwendungsfelder hervorgebracht. Besonders geeignet sind DEAs für die Verwendung als Ventiltrieb, wie das Beispiel der Firma Festo [39] zeigt
In einer weiteren Veröffentlichung der Universität des Saarlandes [40] wird ein konventionelles Ventil mit Elektromagnet mit einer Version, in der der Elektromagnet durch einen DEA ersetzt ist (Bild 3b), verglichen. Beide Ventile sind in der Lage, 3 bar und einen maximalen Volumenstrom von 9 l/min mit der gleichen Dynamik zu schalten. Allerdings ergibt sich in der Anwendung (Ventil 1,5 Sekunden offen, danach 0,5 Sekunden geschlossen halten) eine Energieersparnis von über 99 %, da der DE zum Öffnen nur einmal geladen werden muss und diese Position anschließend stromlos hält. Durch diesen geringen Energieverbrauch findet auch keine Erwärmung des Ventils statt, was bei dem Handling von sensiblen Medien eine wichtige Rolle spielen kann.
Weiterhin lässt sich der DE im Gegensatz zum Elektromagnetventil auch proportional ansteuern, um eine Durchflussregelung zu realisieren. Weitere Studien müssen zeigen, ob die Self-Sensing-Funktionalität auch Rückschlüsse auf den anliegenden Druck zulassen. Eine weitere Anwendung sind Vibrationsförderer (Bild 3c) [41]. Hier liegen die Vorteile von DEA vor allem in ihrer hohen Dynamik. Diese erlaubt es, das Bewegungsprofil der Förderrinne ohne Rüstzeit an ein neues Fördergut anzupassen. Der Self-Sensing Effekt erlaubt zusätzlich Rückschlüsse auf die Fördermenge oder Art des Förderguts. Die hohe Dynamik von DEA wird auch in einem weiteren Anwendungsfeld genutzt. Durch ihre hohe Designfreiheit erlauben DE den Aufbau hochkompakter und an die Anwendung angepasster Aktoren für haptisches Feedback bspw. in Knöpfen und Touchscreens. Zudem lassen sich DEA aufgrund ihrer mechanischen Flexibilität auch in Kleidungsstücke wie z. B. Handschuhe integrieren.
Neben der kombinierten Nutzung von Aktorik und Sensorik, ist die intrinsische Nachgiebigkeit und Elastizität von DEA und FGL-Aktoren eine attraktive Eigenschaft in Hinblick auf Mensch-Roboter-Kollaboration. In Kombination mit den geringen Aktormassen können so sehr sichere Robotersysteme entstehen, die im Gegensatz zu steif und starr wirkenden Systemen einen natürlich weichen Eindruck vermitteln.
Literatur
[1] Janocha, H.: Adaptronics and Smart Structures. Basics, Materials, Design, and Applications. Berlin Heidelberg 2007.[2] Lagoudas, D.C.: Shape Memory Alloys: Modeling and Engineering Applications. New York 2008.
[3] SAES Getters. SmartFlex Brochure 2017. URL: https://www.saesgetters.com/sites/default/files/SmartFlex Brochure_2.pdf, Abrufdatum 01.03.2018.
[4] Dynalloy Inc. Technical Characteristics of Flexinol Actuator Wires 2017. URL: http://www.dynalloy.com/pdfs/TCF1140.pdf, Abrufdatum 01.03.2018.
[5] Janocha, H.: Unkonventionelle Aktoren – Eine Einführung. München 2013.
[6] Hollerbach, J.M.; Hunter, I.W.; Ballantyne, J.A.: Comparative analysis of actuator technologies for robotics. In: The Robotics Review (1992) 2, S. 299-342.
[7] Motzki, P.; Gorges, T.; Würtz, T.; Seelecke, S.: Experimental Investigation of High-Speed/High-Voltage SMA Actuation. In: ASME 2017 Conference on Smart Materials, Adaptive Structures and Intelligent Systems. Snowbird USA 2017.
[8] Motzki, P.; Gorges, T.; Seelecke, S.: Hoch-Volt Ansteuerung: Ultraschnelle FGL-Aktorik. In: VDI-Expertenforum: Smart Materials – kompakte, intelligente Systeme für eine innovative Industrie. Potsdam 2016.
[9] Actuator Solutions GmbH: Actuator Solutions SMA Products 2018. URL: http://www.actuatorsolutions.de/products/, Abrufdatum 01.03.2018.
[10] Köpfer, M.: Industrialisierung der FGL-Technologie in hochvolumigen Serienprodukt. In: VDI-Expertenforum: Smart Materials – Aus der Forschung in die industrielle Anwendung. Potsdam 2017.
[11] Theiß, R.; Czechowicz, A.; Dültgen, P.: Industry 4.0 using shape memory actuators – opportunities and challenges. In Conference: Actuator 2016. Bremen.
[12] Motzki, P.; Seelecke, S.: Bistabile Aktorvorrichtung mit einem Formgedächtniselement. 2016.
[13] Motzki, P.; Seelecke, S.: Bistable Actuator Device Having A Shape Memory Element. 2016.
[14] Seelecke, S.: Thermische Formgedächtnislegierungen – vom Werkstoff auf dem Weg zum Produkt. In: VDI-Expertenforum: Smart Materials – Aus der Forschung in die industrielle Anwendung. Potsdam 2017.
[15] Khelfa, F.; Zimmer, L.; Motzki, P.; Seelecke, S.: Development of a Reconfigurable End-Effector Prototype. In: ASME 2017 Conference on Smart Materials, Adaptive Structures and Intelligent Systems. Snowbird USA 2017.
[16] Simone, F. Rizzello, G.; Seelecke, S.: Metal muscles and nerves – A self-sensing SMA-actuated hand concept. In: Smart Materials and Structures 26 (2017) 9. S. 095007.
[17] Pelrine, R.E.; Kornbluh, R.D.; Joseph, J.P.: Electrostriction of polymer dielectrics with compliant electrodes as a means of actuation. In: Sensors and Actuators A: Physical 64 (1998) 1, S. 77-85.
[18] Carpi, F.; De Rossi, D.; Kornbluh, R.D.; Pelrine, R.E.; Sommer-Larsen, P.: Dielectric Elastomers as Electromechanical Transducers: Fundamentals, Materials, Devices, Models and Applications of an Emerging Electroactive Polymer Technology. Amsterdam 2008.
[19] Parker-Hannifin, “Sensor Datasheet EAPS-50RT/100RT,” p. 2 [Online]. Available: http://promo.parker.com/promotionsite/eap/us/en/products/Sensors. [Accessed: 23-Feb-2018].
[20] O’Brien, B.; Gisby, T.; Anderson, I.A.: Stretch sensors for human body motion. In: Proceedings of SPIE 9056 – The International Society for Optical Engineering 2014, S. 905618.
[21] York, A.; Dunn, J.; Seelecke, S.: Systematic approach to development of pressure sensors using dielectric electro-active polymer membranes. In: Smart Materials and Structures 22 (2013) 9. S. 094015.
[22] Koh, S.J.A.; Keplinger, C.; Li, T.; Bauer, S.; Suo, Z.: Dielectric Elastomer Generators: How Much Energy Can Be Converted? In: IEEE/ASME Transactions on Mechatronics 16 (2011) 1, S. 33-41.
[23] Zanini, P.; Rossiter, J.; Homer, M.: Self-stabilizing dielectric elastomer generators. In: Smart Materials and Structures 26 (2017) 3. S. 035037.
[24] McKay, T.G.; Rosset, S.; Anderson, I.A.; Shea, H.R.: Dielectric elastomer generators that stack up. In: Smart Materials and Structures 24 (2017) 1. S. 015014.
[25] O’Halloran, A.; O’Malley, F.; McHugh, P.: A review on dielectric elastomer actuators, technology, applications, and challenges. In: Journal of Applied Physics 104 (2008) 7. S. 071101.
[26] Pelrine, R.E.; Sommer-Larsen, P.; Kornbluh, R.D.; Heydt, R.; Kofod, G.; Pei, Q.; et al.: Applications of dielectric elastomer actuators. In: Bar-Cohen, Y (Hrsg): Smart structures and materials 2001: Electroactive polymer actuators and devices. Bellingham 2001, S. 335-349.
[27] Bar-Cohen, Y.: Electroactive Polymers as Artificial Muscles: Capabilities, Potentials and Challenges. Reston 2000, S. 188-196.
[28] Maas, J.; Tepel, D.; Hoffstadt, T.: Actuator design and automated manufacturing process for DEAP-based multilayer stack-actuators. In: Meccanica 50 (2015) 11, S. 2839-2854.
[29] Haus, H.; Matysek, M.; Mößinger, H.; Schlaak, H.F.: Modelling and characterization of dielectric elastomer stack actuators. In: Smart Materials and Structures 22 (2013) 10. S. 104009.
[30] Kovacs, G.; Düring, L.; Michel, S.; Terrasi, G.: Stacked dielectric elastomer actuator for tensile force transmission. Sensors and Actuators A: Physical 155 (2009) 2, S. 299-307.
[31] Hau, S.; Bruch, D.; Rizzello, G.; Motzki, P.; Seelecke, S.: Silicone based dielectric elastomer strip actuators coupled with non-linear biasing elements for large actuation strains. 2018.
[32] Hau, S.; York, A.; Seelecke, S.: High-Force Dielectric Electroactive Polymer (DEAP) membrane actuator. In: Bar-Cohen, Y; Vidal, F. (Hrsg): Proceedings SPIE 9798, Electroactive Polymer Actuators and Devices (EAPAD). Las Vegas 2016.
[33] Rizzello, G.; Naso, D.; York, A.; Seelecke, S.: Closed loop control of dielectric elastomer actuators based on self-sensing displacement feedback. In: Smart Materials and Structures 25 (2016) 3. S. 035034.
[34] Rosset, S.; O’Brien, B.M.; Gisby, T.; Xu, D.; Shea, H.R.; Anderson, I.A.: Self-sensing dielectric elastomer actuators in closed-loop operation. In: Smart Materials and Structures 22 (2013) 10. S. 104018.
[35] Rosset, S.; de Saint-Aubin, C.; Poulin, A.; Shea, H.R.: Assessing the degradation of compliant electrodes for soft actuators. In: Review of Scientific Instruments 88 (2017) 10, S. 105002.
[36] Hill, M.; Rizzello, G.; Seelecke, S.: Development of a fatigue testing setup for dielectric elastomer membrane actuators. In: Conference: SPIE Smart Structures and Materials+ Nondestructive Evaluation and Health Monitoring 2017.
[37] Matysek, M.; Lotz, P.; Schlaak, H.: Lifetime investigation of dielectric elastomer stack actuators. In: IEEE Transactions on Dielectrics and Electrical Insulation 18 (2011) 1, S. 89-96.
[38] Optotune, “Products” [Online]. Available: http://www.optotune.com/products. [Accessed: 06-Jan-2018].
[39] Giousouf, M., and Kovacs, G., 2013, “Dielectric Elastomer Actuators Used for Pneumatic Valve Technology,” Smart Mater. Struct, 22, pp. 104010–6, doi: 10.1088/0964-1726/22/10/104010.
[40] Hill, M.; Rizzello, G.; Seelecke, S.: Development and experimental characterization of a pneumatic valve actuated by a dielectric elastomer membrane. In: Smart Materials and Structures 26 (2017) 8. S. 085023.
[41] Bonci, A.; Longhi, S.; Pirani, M.; Lorenzoni, E.; Rizzello, G.; Naso, D.; Seelecke, S.: Simulation Analysis and Performance Evaluation of a Vibratory Feeder Actuated by Dielectric Elastomers. In: The 14th IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications (2018), S. 1-6.






