

SailAway: Spatial Cognition in Sea Navigation | 
|
SailAway: Raumkognition zur Steuerung von Schiffen
| Journal | Industrie Management |
| Issue | Volume 24, 2008, Edition 4, Pages 21-24 |
| Share | Cite | Download |
Abstract
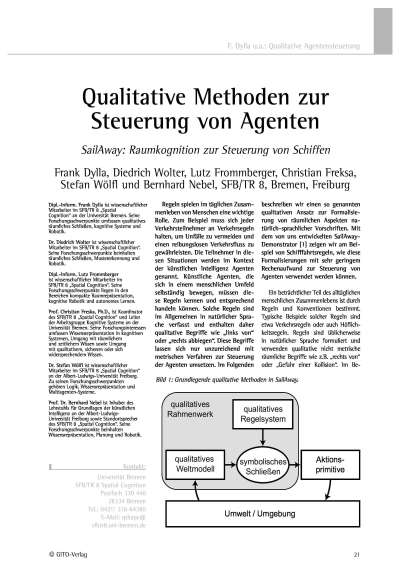
Rules play an important role in everyday human interaction. In road traffic the participants have to obey to the rules to guarantee smooth traffic flow and to avoid accidents. The participants in these situations are called agents. Artificial agents that act in this environment must be aware of these rules and must act accordingly. Typically, such rules are formulated in natural language and thus, contain qualitative terms like “from left” or “turn right”. These terms are only intricately to implement to navigate agents. In this article we describe a so-called qualitative approach to formalize natural language spatial regulations. With the demonstrator SailAway [1] we show how the formalizations can be applied with little computational effort for collision free navigation in the domain of vessel navigation.
Access limited
You are currently not logged in / not yet registered.
In order to download the desired file(s), you must be logged in and have an appropriate inclusive subscription. Alternatively, you can also obtain access by paying a one-off fee.
| Subscription | included | Purchase |
|---|---|---|
| without | − | 29,00 € |
| Digital | ✓ | 0,00 € |
| Expert | ✓ | 0,00 € |
| Professional | ✓ | 0,00 € |
All prices include 7% VAT
After purchasing access rights, you will automatically be redirected back to this page.