Angewandte KI für die menschenzentrierte Montage |
Ein ethisch fundierter Ansatz zur Gestaltung von Arbeitsplätzen
| Zeitschrift | Industry 4.0 Science |
| Ausgabe | 42. Jahrgang, 2026, Ausgabe 1, Seite 60-68 |
| Open Access | https://doi.org/10.30844/I4SD.26.1.60 |
| Literatur | Teilen | Zitieren | Download |
Abstract
Keywords
Artikel
Montagearbeitsplätze entwickeln sich rasch weiter, da Künstliche Intelligenz (KI) zunehmend in industrielle Produktionsumgebungen integriert wird. Insbesondere die Fähigkeit, menschliche Bewegungen vorherzusagen und Merkmale innerhalb eines Arbeitsbereichs zu identifizieren, ist entscheidend für die Optimierung von Montageaufgaben, die Verfolgung des Fortschritts und die Ermöglichung flexibler Konfigurationen. Mit dem zunehmenden Einsatz kollaborativer Roboter verlagert sich das traditionelle Modell der festen Automatisierung hin zu einer menschenzentrierten Automatisierung, bei der Menschen und Maschinen bei gemeinsamen Aufgaben eng zusammenarbeiten. Dieser Ansatz ist besonders vorteilhaft in der hochvariablen Kleinserienfertigung, wo Flexibilität und Anpassungsfähigkeit unerlässlich sind.
Eine effektive Mensch-Roboter-Zusammenarbeit (MRK) hängt von der Fähigkeit des Roboters ab, menschliche Handlungen zu antizipieren. Um dies zu erreichen, sind Systeme erforderlich, die Körperbewegungen, Gesten, Blicke und Körperhaltungen in Echtzeit erfassen und interpretieren können. Die manuelle Interpretation solcher Verhaltensweisen ist oft langsam und kontextabhängig, weshalb KI-gestützte Lösungen unerlässlich sind. Prädiktive Modelle, die multimodale Sensordaten wie Skelettgelenkbahnen und Eye-Tracking-Signale verarbeiten, ermöglichen es Systemen, sowohl die physischen Handlungen als auch die dahinter stehenden Absichten zu erschließen. Diese Fähigkeiten verwandeln herkömmliche Arbeitsplätze in intelligente, reaktionsfähige Umgebungen.
Intelligente Arbeitsplätze, die menschliche Eingaben und robotische Unterstützung kombinieren, sind so konzipiert, dass sie sich durch proaktive Unterstützung an das Verhalten der Benutzer anpassen. Während KI-Unterstützung in kontrollierten Umgebungen bereits gut etabliert ist, gibt es bei der Anwendung dieser Systeme in der realen Produktion noch Herausforderungen. Zu diesen Herausforderungen gehören u. a. die Interpretation von Modellen, die Transparenz von KI-Entscheidungen und die Einhaltung neuer Vorschriften. Insbesondere prädiktive KI-Systeme, die menschliches Verhalten modellieren, müssen bewertet werden, um sicherzustellen, dass sie mit ethischen Standards übereinstimmen, wie dem EU AI Act, der solche Systeme in MRK als „risikoreich“ einstuft. Diese Einstufung erfordert die Einhaltung strenger Richtlinien in Bezug auf menschliche Aufsicht, Datenschutz, Fairness und Transparenz [1].
In dieser Arbeit stellen wir einen ganzheitlichen und systematischen Ansatz für die Anwendung der KI-Ethikbewertung auf einen industriellen Anwendungsfall vor, der auf Werkerassistenzsystem basiert, das menschliche Arbeiter bei der Montage unterstützt. Der Ansatz kombiniert multimodale Sensorik und KI, um menschliche Absichten und Konzentration anhand von Bewegungs- und Blickdaten vorherzusagen. Zusätzlich zur technischen Umsetzung bewerten wir die ethischen und regulatorischen Auswirkungen des Systems unter Verwendung der Z-Inspection® [2]. Ursprünglich zur Bewertung vertrauenswürdiger KI entwickelt, hat sich Z-Inspection® in Bereichen wie dem Gesundheitswesen bewährt und bietet eine strukturierte Methode zur Bewertung der Übereinstimmung mit rechtlichen, sozialen und technischen Standards.
Dieser Artikel stellt erste Ideen für die Anwendung von Z-Inspection® in einer industriellen Montageumgebung vor. Wir untersuchen, ob diese Methodik die ethische Bewertung von prädiktiver KI in dynamischen, physisch interaktiven Umgebungen, in denen Sicherheit, Verantwortlichkeit und menschliches Engagement von entscheidender Bedeutung sind, wirksam unterstützen kann. Während großangelegte Tests noch laufen, deuten vorläufige Beobachtungen auf bemerkenswerte Verbesserungen hin, wie klarere Aufgabenanweisungen, geringere körperliche Belastung und beibehaltene Kontrolle durch den Bediener. Diese Erkenntnisse werden zu praktischen und anpassungsfähigen Grundsätzen für KI-gestützte Montagearbeiten zusammengefasst. Die Ergebnisse basieren auf ersten qualitativen Beobachtungen aus dem Pilotbetrieb; Pläne für eine quantitative Validierung, einschließlich Bewertungen von Körperhaltung, Aufgabendauer und Bedienerkomfort, sind in Arbeit.
Aktuelle Entwicklungen in der KI für menschenzentrierte Montage
KI für intelligente Arbeitsassistenten in der Montage bietet erhebliche Vorteile in Bezug auf betriebliche Effizienz, Mensch-Roboter-Zusammenarbeit und das Wohlbefinden der Mitarbeiter. So kann sie etwa Fertigungsprozesse optimieren, indem sie Fertigungslinien an schwankende Produktdesigns und Marktanforderungen anpasst, das Lebenszyklusmanagement von Anlagen durch vorausschauende Wartung verbessert und die Personalzuweisung auf der Grundlage von Fähigkeiten und Produktionsanforderungen optimiert [3]. Die Rolle der KI bei der Fehlerprüfung und Produktqualität ist entscheidend für die Verbesserung des Produktlebenszyklus, vom Design bis zum Kundendienst [4].
In einem Szenario der Mensch-Roboter-Zusammenarbeit (MRK) wurde in [5] die Erkennung menschlicher Handlungen (Human Activity Recognition, HAR) in Montagelinien vorgeschlagen, um die Effizienz der MRK zu verbessern. Dieses Framework wurde in realen Anwendungen validiert und hat seine Wirksamkeit bei der Verbesserung der Mensch-Roboter-Interaktion unter Beweis gestellt. In ähnlicher Weise schaffen die in [6] vorgeschlagenen Konversationsmodelle eine natürlichere Mensch-Roboter-Interaktion in realen Szenarien. In [7] werden digitale intelligente Assistenten (DIAs) vorgeschlagen, die große Sprachmodelle (LLMs) nutzen, um die kognitive Arbeitsbelastung zu reduzieren und gleichzeitig die Benutzererfahrung in Montageprozessen zu verbessern.
KI kann potenzielle ergonomische Probleme in Fertigungsprozessen erkennen und so Arbeitsunfälle und langfristige gesundheitliche Probleme verhindern. Automatisierte Lösungen analysieren die Arbeitszuweisungen der Bediener, um ergonomische Sicherheit zu gewährleisten, und passen sich Änderungen der Liniengeschwindigkeit oder des Produktmixes an [8]. Durch die Integration von KI in die Fertigung verändert sich die Rolle des Menschen von der reinen Interaktion mit Technologie hin zur aktiven Zusammenarbeit mit KI-gestützten Agenten. Dieser Wandel erfordert ein umfassendes Verständnis der Zusammenarbeit zwischen Mensch und KI, um Systeme zu entwickeln, die eine effektive Produktion und das Wohlbefinden der Bediener unterstützen [9].
Die Integration von KI-Lösungen in Fertigungsprozesse bringt Herausforderungen in Bezug auf Datenintegration und Skalierbarkeit mit sich. Die Bewältigung dieser Herausforderungen ist entscheidend für die breite Einführung von KI in der Fertigung [3]. Die Entwicklung KI-gestützter Systeme, die menschliche Eingaben bereits in der Entwurfsphase berücksichtigen, kann die Effektivität dieser Systeme in Produktionsumgebungen verbessern [10]. In dieser Hinsicht müssen Herausforderungen im Zusammenhang mit Datenintegration, Skalierbarkeit und ethischen Überlegungen angegangen werden, um das Potenzial von KI in diesem Bereich voll auszuschöpfen. Zukünftige Forschungsarbeiten sollten sich auf die Entwicklung von Vorhersagemodellen, die Optimierung von Strategien zum Austausch von Anlagen und die Entwicklung von kollaborativen Mensch-KI-Systemen konzentrieren, die eine effektive Produktion und das Wohlbefinden der Bediener wirklich unterstützen.
Menschzentrierte Anwendungen wie die Mensch-Roboter-Kollaboration (MRK) nutzen fortschrittliche Sensortechnologie und maschinelles Lernen, um menschliche Bewegungsabläufe anhand von Zeitreihendaten vorherzusagen. Dadurch verbessern sie die Reaktionsfähigkeit von Robotern und verhindern Kollisionen. Es gibt verschiedene Techniken zur Modellierung menschlicher Bewegungen, darunter Deep Learning [11], Gaußsche Mischmodelle [12] und Bewegungsdiffusionsmodelle [13]. Gaußsche Mischmodelle (GMMs) und ihre Derivate haben sich als gut geeignet für die Verarbeitung zeitlicher Variabilität und multimodaler Verteilungen erwiesen [12, 14]. Ebenso sind aufmerksamkeitsbasierte Netzwerke vielversprechend für die Modellierung sequenzieller Daten bei Aufgaben, die Gesten- und Bewegungsvorhersagen beinhalten [15].
Aus ethischer Sicht wurden mehrere Rahmenwerke vorgeschlagen, um einen verantwortungsvollen Einsatz von KI zu gewährleisten. Die hochrangige Expertengruppe der EU für KI hat Leitlinien für vertrauenswürdige KI vorgestellt, in denen menschliches Handeln, Transparenz, Datenschutz und Nichtdiskriminierung im Vordergrund stehen. Diesen Leitlinien fehlen jedoch konkrete Umsetzungsstrategien, insbesondere in dynamischen industriellen Kontexten. Die Z-Inspection®-Methodik schließt diese Lücke, indem sie einen strukturierten, iterativen Prozess zur Bewertung von KI-Systemen unter rechtlichen, ethischen und technischen Gesichtspunkten bereitstellt. Ursprünglich im Bereich der KI im Gesundheitswesen angewendet, weisen aktuelle Arbeiten auf ihre potenzielle Anpassungsfähigkeit an industrielle und fertigungstechnische Kontexte hin (siehe [2]).
Trotz dieser Fortschritte besteht weiterhin eine Lücke bei der Integration prädiktiver KI-Modelle mit ganzheitlichen ethischen Bewertungen in realen industriellen Umgebungen. Unsere Arbeit befasst sich mit diesem Problem, indem sie technische Innovation mit regulatorischer Angleichung kombiniert und dabei ein Szenario des ELAM-Systems verwendet, einem von Armbruster Engineering entwickelten digitalen Werkerassistenzsystem.
Vorgeschlagene Methode für ein KI-gestütztes Motion-Capture-System
In dieser Arbeit schlagen wir eine Methode für angewandte KI vor, die auf einer modularen Pipeline basiert, die menschliche Bewegungsmodellierung, Inferenz und prädiktives Verständnis menschlicher Bewegungen für assistive intelligente Arbeitsplätze unter Verwendung der vertrauenswürdigen KI-Bewertung Z-Inspection® nutzt. Der Z-Inspection®-Prozess umfasst drei Hauptphasen: Einrichtung, Zugriff und Lösung. Die Einrichtungsphase umfasst Voraussetzungen, Team, Grenzen und Kontexte, während die Zugriffsphase sich auf soziotechnische Szenarien, ethische Fragen, eine Karte ethischer Spannungen gemäß den Vorschriften sowie die Definition und Ausführung von Aktionspfaden erstreckt. In der Lösungsphase werden Lösungen gefunden und empfohlen.
Unser Ansatz wendet die Z-Inspection®-Methode auf die KI-gesteuerte digitale Analyse menschlicher Bewegungen an und verbessert so die Prozessüberwachung, indem manuelle Montageaufgaben identifiziert werden, für die in der Regel keine sensorgestützte Dokumentation vorliegt. Auf diese Weise kann ELAM diese Aktionen effektiv aufzeichnen und sich ohne Hardwareänderungen flexibel an unterschiedliche Aufgaben anpassen.
Darüber hinaus kann durch die ergonomische Überwachung mittels digitaler Analyse menschlicher Bewegungen die Arbeitsstation automatisch angepasst werden, um die körperliche Belastung zu reduzieren. Die Analyse digitaler Bewegungsdaten kann auch zu einer besseren Gestaltung der Arbeitsplätze führen, indem häufig verwendete Komponenten strategisch positioniert werden, was die Effizienz verbessert. Darüber hinaus könnte die digitale Erfassung vollständiger Montageabläufe die Erstellung genauer Arbeitsanweisungen rationalisieren und so die Ersteinrichtung und zukünftige Anpassungen erleichtern. In unserem vorgeschlagenen Ablauf (Bild 1) sind die drei Phasen in der Z-Inspection®-Zugriffsphase enthalten.
Phase 1 – Inferenz und prädiktive KI
Phase 1 umfasst die Erstellung eines Offline-Primitivbewegungsmodells unter Verwendung von Morphable Graphs [12]. Ein Motion-Capture-System erfasst die Skelettbahnen eines Arbeiters während typischer Montageaufgaben. Die primitiven Bewegungsmodelle werden auf der Grundlage der erweiterten Arbeit erstellt, die ursprünglich in einem neuen Planungsansatz von Manns et al. [16] vorgestellt wurde, bei dem ein Gaußsches Mischmodell (GMM) und eine funktionale Hauptkomponentenanalyse (FPCA) kombiniert wurden, um probabilistische primitive Bewegungsmodelle zu erstellen [13]. Jede Primitive wird als strukturierter Eintrag in einem Wissensrepräsentationsmodul codiert und bildet so eine domänenspezifische Bewegungsbibliothek.
In dieser Phase werden Echtzeit-Bewegungserfassungsdaten in den erlernten FPCA-Raum projiziert. Ein wahrscheinlichkeitsbasierter Inferenzmechanismus klassifiziert das beobachtete Bewegungssegment und sagt zukünftige Frames voraus. Das System identifiziert nicht nur, welche Primitive ausgeführt wird, sondern prognostiziert auch die wahrscheinliche nachfolgende Aktion, wodurch vorausschauendes Verhalten bei Roboterassistenten ermöglicht wird. Die roten gestrichelten Linien in Bild 1 heben die Echtzeit-Test- und Inferenzpfade dieser Phase hervor.
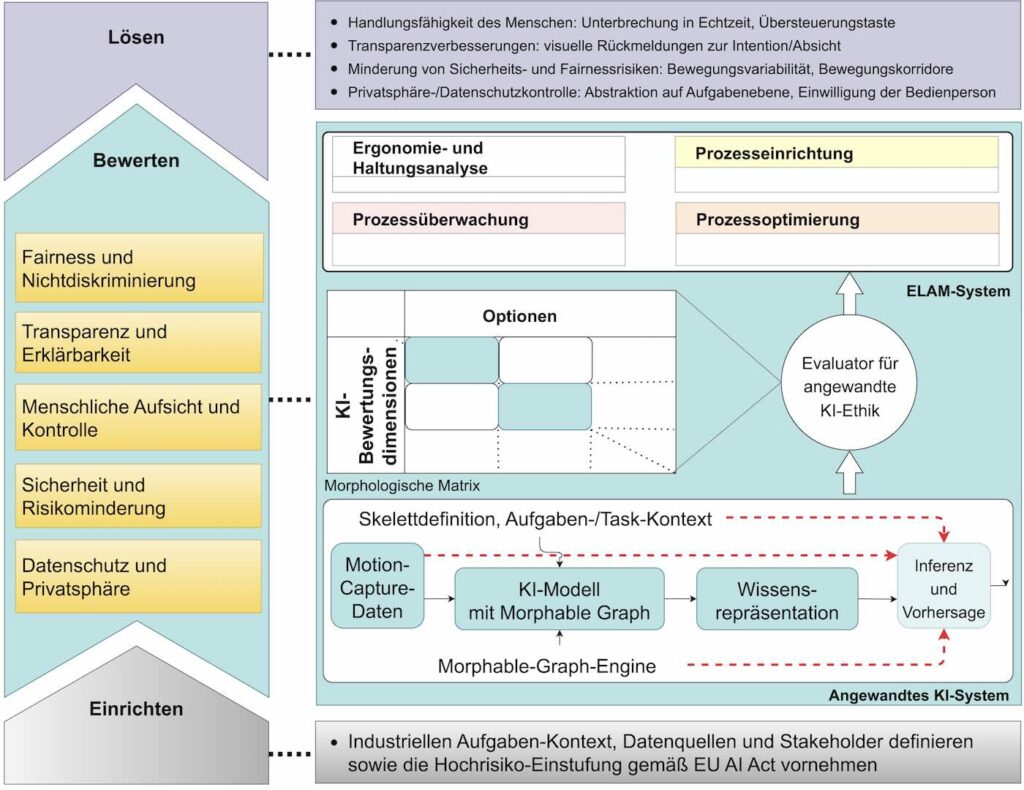
Phase 2 – Bewertung der „angewandten KI-Ethik“ anhand einer morphologischen Matrix
Um sicherzustellen, dass prädiktive KI mit dem EU-KI-Gesetz konform ist und vertrauenswürdige und erklärbare KI fördert, insbesondere an intelligenten Arbeitsplätzen, wird eine ganzheitliche Bewertung der angewandten KI-Ethik und Vertrauenswürdigkeit auf der Grundlage der Z-Inspection®-Methodik vorgeschlagen. Diese Bewertung ist Teil der Motion-Capture-Unterstützung für KI in ELAM, die die ethischen, rechtlichen und technischen Aspekte des Systems kontinuierlich überwacht.
Zu den wichtigsten ethischen Überlegungen, die bei dieser Bewertung zu berücksichtigen sind, gehören:
- Fairness und Nichtdiskriminierung,
- Transparenz und Erklärbarkeit,
- Sicherheit und Risikominderung,
- menschliche Aufsicht und Kontrolle sowie
- Datenschutz und Privatsphäre
Dies sollte die Fairness bei der Risikoanalyse von Bewegungs- oder Blickdaten, die Repräsentativität von Trainingsdatensätzen und die Vermeidung systematischer Benachteiligungen für bestimmte Betreiber umfassen. Ebenso müssen die Transparenz und die Erklärbarkeit des KI-Modells die Erstellung verständlicher Vorhersagen und Erklärungen zu den Gründen, den Inhalten und den nächsten Schritten sowie die Information der Menschen über Systementscheidungen umfassen.
Sicherheit und Risikominderung umfassen die Verhinderung schädlichen oder unbeabsichtigten Verhaltens von Robotern, die Echtzeit-Risikoüberwachung (z. B. Kollisionserkennung) und vorausschauende Bewegungen mit Sicherheitsbeschränkungen. Menschliche Aufsicht und Kontrolle umfassen die Übersteuerung durch den Bediener, die endgültige Entscheidungsgewalt, die Fehlerbehebung und Korrekturmaßnahmen bei Fehleinschätzungen. Schließlich konzentrieren sich Datenschutz und Privatsphäre darauf, wie Bewegungs- oder Blickdaten anonymisiert, die erforderliche Einwilligung eingeholt und die Offenlegung personenbezogener Daten minimiert werden können.
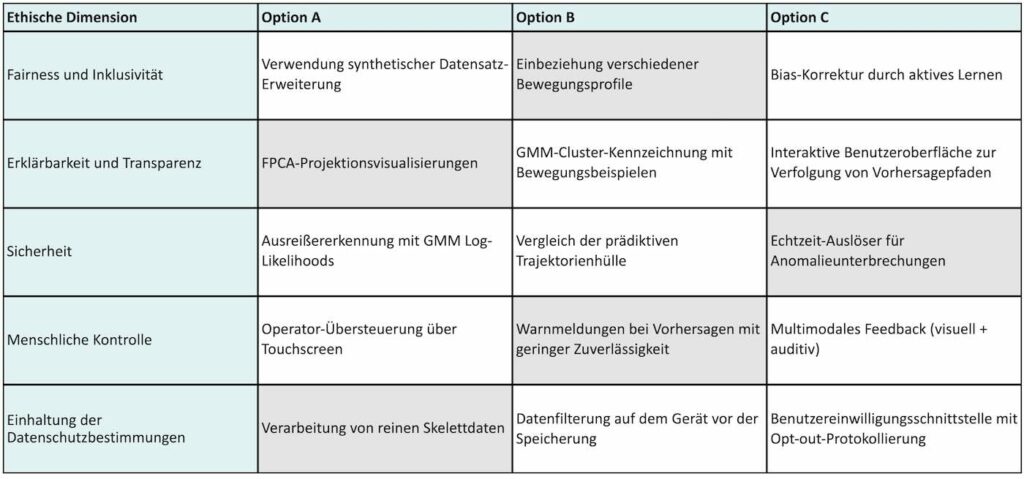
Um die Ethik und Vertrauenswürdigkeit einer KI-Anwendung in einem Produktionsszenario zu bewerten, wird das ganzheitliche Konzept systematisch anhand einer morphologischen Matrix beschrieben. Diese Matrix unterstützt eine anpassungsfähige, transparente und multiperspektivische Bewertung sowohl während der Systementwicklung als auch im Live-Betrieb.
Phase 3 – ELAM-Integration
In dieser Phase wird das Anwendungskonzept für ein KI-gestütztes Motion-Capture-System für ELAM zur Prozessüberwachung, -optimierung und ergonomischen Analyse vorgeschlagen. Die angewandte KI, die als Input für die Analysen von ELAM dient, wird anhand der Ethik der angewandten KI auf ihre Konformität hin bewertet.
Bewertung der angewandten KI-Ethik für ein kollaboratives Montageszenario in der Praxis
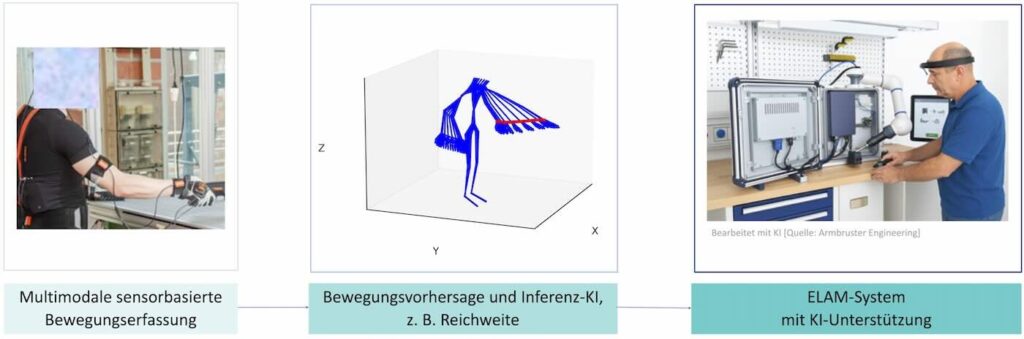
Betrachten wir eine intelligente Montagestation (Bild 2), die mit dem von Armbruster Engineering entwickelten ELAM-Werkerassistenzsystem ausgestattet ist, bei dem ein menschlicher Bediener mit einem Cobot zusammenarbeitet, um schwere oder sperrige Komponenten wie eine große Schaltschranktür zu montieren. Bewegungssensoren und ein am Kopf befestigter Eye-Tracker überwachen kontinuierlich die Aktionen und den Blick des Bedieners.
Wenn der Bediener kurz auf die Scharnierposition schaut und nach dem Schraubwerkzeug greift, schließt die KI auf die Absicht, die Tür zu montieren, und weist den Cobot proaktiv an, die Tür in einer ergonomischen Höhe zu positionieren und sicher zu halten, während der Bediener die Scharniere mit einem drehmomentgesteuerten Schraubendreher befestigt. Diese proaktive Unterstützung reduziert Ausrichtungszeit und Leerlaufzeiten, macht zusätzliche Personen oder Hilfsvorrichtungen überflüssig und verbessert die allgemeine Sicherheit und Ergonomie.
In dieser Konfiguration kommuniziert die ELAM-Schnittstelle die vorausschauenden Entscheidungen des Cobots über ein Roboterbetriebssystem (z. B. ROS2). Der Bediener behält die volle Kontrolle und kann falsche Aktionen über einen Touchscreen korrigieren. In der Praxis erhöht die Übersteuerungsfunktion die Autonomie des Bedieners, da sie eine sofortige Korrektur von Fehlprognosen der KI ermöglicht. Wenn der Cobot eine falsche Bewegung oder Position auswählt, kann der Bediener die Aktion stoppen oder ändern, ohne den Arbeitsablauf zu unterbrechen. Dadurch bleibt die Kontrolle beim Benutzer und Fehler können schnell behoben werden, sodass die Entscheidungsgewalt auch während der vorausschauenden Unterstützung beim Menschen verbleibt.
Die ethische Aufsicht wird gemäß dem Z-Inspection®-Rahmenwerk gewährleistet, das Erklärbarkeit, menschliche Aufsicht und Datenrückverfolgbarkeit in den Vordergrund stellt. Das System kann für andere Aufgaben mit schweren oder unhandlichen Teilen wie Frontplatten oder Chassis-Baugruppen angepasst werden und unterstützt vielseitiges Halten, präzise Positionierung und schrittweise Führung beim Mehrpunkt-Schrauben. Da das System auf kamera- und bewegungsbasierter Verfolgung basiert, werden Datenschutzmaßnahmen wie Anonymisierung, Transparenz und Einwilligung des Benutzers bereits in der ersten Entwurfsphase berücksichtigt.
Die vorausschauende Unterstützung fördert nicht nur die Autonomie des Bedieners, sondern reduziert auch unnötige Bewegungsanstrengungen und Belastungen, die während der Pilotversuche qualitativ beobachtet wurden. Die Z-Inspection®-Bewertung floss direkt in diese Designentscheidungen ein, indem sie Risiken in Bezug auf Fehlprognosen, Transparenz, Daten und Datenverarbeitung identifizierte und diese in konkrete Maßnahmen zur Risikominderung wie Übersteuerungssteuerung, Visualisierung von Absichten, Sicherheitsgrenzen und Privacy-by-Design-Maßnahmen umsetzte. Diese Methode verbindet menschliche Analyse, ergonomische Erkenntnisse und die Reproduzierbarkeit von Z-Inspection®.
Ausrichtung des KI-Designs auf ethische Dimensionen
Der vorgeschlagene Anwendungsfall wurde aufgrund seines Potenzials für Produktmontageanwendungen ausgewählt, da er KI auf Basis eines Motion-Capture-Systems unterstützt und mit dem ELAM-Arbeitnehmerunterstützungssystem kombiniert. Er umfasst Funktionen für Prozessüberwachung, Ergonomie, Prozessoptimierung und Prozesseinrichtung. Diese vier Funktionen können virtuell auf jeden externen Montageprozess angewendet werden, der ein Arbeitnehmerunterstützungssystem nutzt, unabhängig vom Produkttyp. Der Einsatz einer auf einem Motion-Capture-System basierenden KI im ELAM-System hat somit das Potenzial, Prozesse zu verbessern und damit Kosten zu senken. Insbesondere die angewandte KI-Ethik-Bewertungsebene trägt dazu bei, KI-Risiken zu mindern.
Die angewandte KI basiert auf interpretierbaren, erklärbaren probabilistischen Modellen. Da die Eingabedaten aus Skelettdaten und räumlicher Semantik bestehen, ist das Risiko einer Manipulation der Ethik und Vertrauenswürdigkeit gering. Aus ethischer Sicht birgt diese Integration sowohl Risiken als auch Chancen. Da sich das System bei der KI-gesteuerten Inferenz auf menschliche Bewegungen konzentriert, muss es gründlich anhand bestehender KI-Ethikstandards und regulatorischer Rahmenbedingungen bewertet werden. Zur Unterstützung kann der eingeführte systematische Ansatz zusammen mit einer konfigurierbaren morphologischen Matrix (Bild 3) eine wichtige Rolle bei der Risikobewertung und -minderung spielen.
Abschließende Überlegungen zur ethischen angewandten prädiktiven KI jenseits von „Industrie 4.0“
Zusammenfassend lässt sich sagen, dass Z-Inspection® ein ganzheitlicher, vertrauenswürdiger und ethisch orientierter Bewertungsprozess ist, der unabhängige Bewertungen durch Fachexperten, Ethiker und Ingenieure umfasst und zu einem Konsens führt. Unsere gemeinsame Bewertung mit Industriepartnern zeigt, wie die Übersteuerung durch den Bediener die menschliche Handlungsfähigkeit verbessert, demonstriert ergonomische Effekte durch qualitative Beobachtungen mit geplanter Validierung und skizziert die Phasen und Abhilfemaßnahmen der Z-Inspection®-Methode. Dieser Ansatz bietet einen transparenteren, evidenzbasierten und reproduzierbaren Rahmen für die ethische Bewertung.
Der vorgestellte Ansatz zeigt die technische Machbarkeit von prädiktiver KI in menschenzentrierten Montageumgebungen und ihre Übereinstimmung mit den Grundsätzen für verantwortungsvolle KI. Dies bildet die Grundlage für den ethischen Einsatz von KI-Systemen in der Industrie 4.0 und ähnlichen Umgebungen. Es bleiben jedoch noch einige Herausforderungen bestehen. Die Echtzeit-Integration von Blick- und Bewegungsdaten ist empfindlich gegenüber Hardware-Einschränkungen wie Sensorqualität, Kopfbewegungen des Bedieners und wechselnden Lichtverhältnissen. Die Aufrechterhaltung der Kalibrierung und Genauigkeit über mehrere Sitzungen hinweg bleibt eine Herausforderung. Darüber hinaus ist es entscheidend, die demografische und Aufgabenvielfalt in den Trainingsdatensätzen sicherzustellen, um systematische Verzerrungen in den KI-Vorhersagen zu vermeiden.
Zukünftige Forschungsarbeiten sollten Längsschnittstudien umfassen, um zu untersuchen, wie sich prädiktive KI auf Vertrauen, Benutzerfreundlichkeit und die Leistung der Bediener auswirkt. Federated Learning könnte die standortübergreifende Generalisierung verbessern und gleichzeitig den Datenschutz und die Einhaltung gesetzlicher Vorschriften gewährleisten. Die Übertragung dieser Prinzipien auf Industrie 5.0 erfordert adaptive Methoden, die Transparenz, Sicherheit und den Fokus auf den Menschen in sich entwickelnden industriellen Umgebungen gewährleisten.
Die Autoren danken der DFG für die finanzielle Unterstützung im Rahmen des HiSMoT-Projekts (Fördernummer: 500490184), dem Bundesministerium für Wirtschaft und Klimaschutz (BMWK) im Rahmen des Programms „Zukunftsinvestitionen für Fahrzeughersteller und Zulieferindustrie” (KoPa 35c) für das Projekt SkaLaB (Fördernummer: 13IK025B) und vom Horizon Europe FLEX4RES-Projekt (Fördernummer: 101091903). Ein besonderer Dank gilt der Armbruster Engineering GmbH & Co. KG für die Bereitstellung des Werkerassistenzsystems ELAM sowie für die kooperative Zusammenarbeit im Rahmen dieses Projekts.
Literatur
[1] European Union: Regulation (EU) 2024/1689 of the European Parliament and of the Council of 13 June 2024 laying down harmonised rules on artificial intelligence and amending Regulations (EC) No 300/2008, (EU) No 167/2013, (EU) No 168/2013, (EU) 2018/858, (EU) 2018/1139 and (EU) 2019/2144 and Directives 2014/90/EU, (EU) 2016/797 and (EU) 2020/1828 (Artificial Intelligence Act). Official Journal of the European Union, L 2024/1689, 12 July 2024. In force. URL: http://data.europa.eu/eli/reg/2024/1689/oj, accessed 03.06.2025.[2] Zicari, R. V.; Brodersen, J.; Brusseau, J.; Du¨dder, B.; Eichhorn, T. et al.: Z-inspection®: A process to assess trustworthy AI. In: IEEE Transactions on Technology and Society 2 (2021) 2, S. 83–97. DOI: 10.1109/TTS.2021.3066209.
[3] Elyasi, M.; Thevenin, S.; Cerqueus, A.: Use of AI in assembly line design and worker and equipment management: review and future directions. In: Flexible Services and Manufacturing Journal 37 (2025) 2, S. 367–408. DOI: 10.1007/s10696-024-09576-4.
[4] Rychtyckyj, N.; Stephens, A.: Assembly ergonomics filters for prevention of injury risk operations at ford motor company, 2009, S. 58-65. DOI: 10.1109/CIVVS. 2009.4938724.
[5] Hartikainen, M.; Spurava, G.; Väänänen, K.: Human-AI collaboration in smart manufacturing: Key concepts and framework for design. In: Frontiers in Artificial Intelligence and Applications 386 (2024), S. 162–172. DOI: 10.3233/FAIA240192.
[6] Gkournelos, C.; Konstantinou, C.; Angelakis, P.; Tzavara, E.; Makris, S.: Praxis: A framework for AI-driven human action recognition in assembly. In: Journal of Intelligent Manufacturing 35 (2024) 8, S. 3697–3711. DOI: 10.1007/s10845-023-02228-8.
[7] Li, C.; Park, J.; Kim, H.; Chrysostomou, D.: How can I help you? an intelligent virtual assistant for industrial robots. 2021, S. 220–224. DOI: 10.1145/ 3434074.3447163.
[8] Roos, G.: Al’s growing role in industrial manufacturing. In: Electronic Products 64 (2022) 3, S. 5–6.
[9] Emmanouilidis, C.; Waschull, S.; Bokhorst, J. A. C.; Wortmann, J. C.: Human in the AI loop in production environments. In: IFIP Advances in Information and Communication Technology 633 (2021), S. 331–342. DOI: 10.1007/978-3-030-85910-7 35.
[10] Colabianchi, S. Costantino, F.; Sabetta, N.: Assessment of a large language model based digital intelligent assistant in assembly manufacturing. In: Computers in Industry 162 (2024). DOI: 10.1016/j.compind.2024.104129.
[11] Holden, D. Saito, J.; Komura, T: A deep learning framework for character motion synthesis and editing. In: ACM Trans. Graph. 35 (2016) 4, S. 1–11. ISSN 0730-0301. DOI: 10.1145/2897824.2925975.
[12] Min, J.; Chai, J.: Motion graphs++: A compact generative model for semantic motion analysis and synthesis. In: ACM Trans. Graph 31 (2012) 6, S. 153:1–153:12. ISSN 0730-0301. DOI: 10.1145/2366145.2366172.
[13] Andreou, N.; Wang, X.; Fernández Abrevaya, V.; Cani, M.-P.; Chrysanthou, Y.; Kalogeiton, V.: LEAD: Latent Realignment for Human Motion Diffusion. In: Computer Graphics Forum, e70093. ISSN 1467-8659. DOI: 10.1111/cgf.70093.
[14] Saeed, R.; Tuli, T. B.; Weikum, M.; Manns, M.: Towards trajectory-based latent space control for human-robot collaboration. In: Procedia CIRP 134 (2025), S. 431–436. DOI: 10.1016/j.procir.2025.02.143.
[15] Bandi, C.; Thomas, U.: Action Conditioned Attention Encoder-Decoder and Discriminator for Human Motion Generation. In: Fred, A.; Hadjali, A.; Gusikhin, O.; Sansone, C. (eds.): Deep Learning Theory and Applications. Cham; Springer Nature Switzerland 2024, S. 259–276. ISBN 978-3-031-66694-0. DOI: 10.1007/978-3-031-66694-0 16.
[16] Manns, M.; Fischer, K.; Du, H.; Slusallek, P.; Alexopoulos, K.: A new approach to plan manual assembly. In: Int. J. Computer Integrated Manufacturing 31 (2018) 9, S. 907–920. DOI: 10.1080/0951192X.2018.1466396.
Ihre Downloads
Lösungen: Montage