

Vom Pixel zur Präsenz |
Ferninteraktion mit Telepräsenzrobotern
| Zeitschrift | Industry 4.0 Science |
| Ausgabe | 40. Jahrgang, 2024, Ausgabe 5, Seite 18-25 |
| Open Access | https://doi.org/10.30844/I4SD.24.5.18 |
| Literatur | Teilen | Zitieren | Download |
Abstract
Keywords
Artikel
In der heutigen Welt gibt es mehrere aktuelle globale Herausforderungen, die sich durch die Gesellschaft ziehen und das berufliche und soziale Leben umfassen. Vor allem der aktuelle Klimawandel und die Auswirkungen der COVID-19-Pandemie verlangen nach Lösungen für die Interaktion und Zusammenarbeit aus der Ferne, die die Reisetätigkeit reduzieren und gleichzeitig die soziale Interaktion aufrechterhalten.
Mit den Fortschritten in der Elektronik, der Robotik sowie der Informations- und Kommunikationstechnologie in der zweiten Hälfte des 20. Jahrhunderts wurden immer ausgefeiltere teleoperative Systeme möglich. Heute werden diese Systeme vor allem in Bereichen eingesetzt, in denen Menschen bei der Bewältigung dieser Herausforderungen an persönliche, sicherheitstechnische oder räumliche Grenzen stoßen oder diese überschreiten würden.
TPRs ermöglichen die Interaktion und Zusammenarbeit aus der Ferne und verringern so die Notwendigkeit von Reisen, was zur Verringerung der mit dem Verkehr verbundenen Kohlenstoffemissionen beiträgt. Darüber hinaus erleichtern diese Roboter die nahtlose Integration von Remote- und hybriden Arbeitsmodellen und stehen im Einklang mit der digitalen Transformation, die moderne Arbeitsplätze umgestaltet, indem sie die Produktivität und Kommunikation verbessern. Darüber hinaus bieten TPRs in der Post-COVID-Ära innovative Möglichkeiten zur Aufrechterhaltung sozialer Beziehungen und zur Gewährleistung von Inklusion, indem sie die durch physische Distanz entstandene Kluft überbrücken und das geistige Wohlbefinden fördern.
Angesichts der Reife der verfügbaren technologischen Komponenten für die Schaffung von TPRs, die auf verschiedene spezifische Aufgaben und Bedürfnisse zugeschnitten sind, ist die wichtigste Frage, wie ein geeignetes Arbeits-/Interaktionsumfeld geschaffen werden kann, in dem das in TPRs vorhandene Potenzial am besten zur Unterstützung des heute zu beobachtenden klimatischen, digitalen und sozialen Wandels genutzt werden kann.
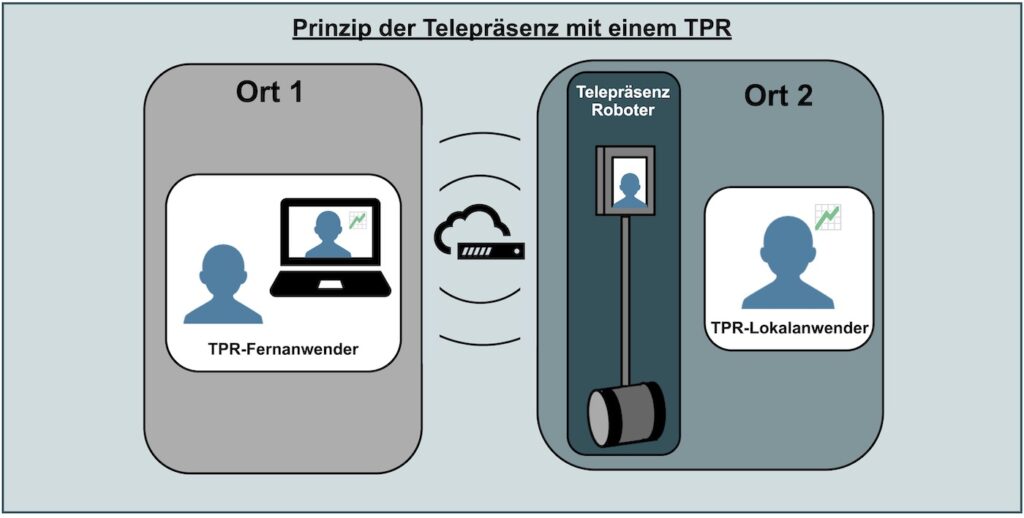
Wie Bild 1 zeigt, kombinieren TPRs derzeit ein mobiles Videokonferenzsystem, das aus der Ferne gesteuert und mit zusätzlichen Werkzeugen zur Manipulation der entfernten Umgebung ausgestattet werden kann. Das charakteristische Merkmal eines TPRs ist, dass ein Fernbenutzer einen Computer oder ein mobiles Gerät verwenden kann, um den TPR an einem anderen Ort zu steuern.
Der TPR vor Ort ermöglicht es dem entfernten Benutzer (TPR-Fernanwender), sich autonom zu bewegen und mit der lokalen Umgebung, d. h. der lokalen Infrastruktur/Maschinen und anderen Benutzern (TPR-Lokalanwender), zu interagieren. Für den TPR-Lokalanwender ändert sich auch die Wahrnehmung des TPR-Fernanwenders (Fahrers) – er erscheint sozial präsenter (telepräsent, erstmals von Minsky [1] beschrieben) und realer als z. B. auf einem Bildschirm.
Anwendungsbereiche der Telepräsenz
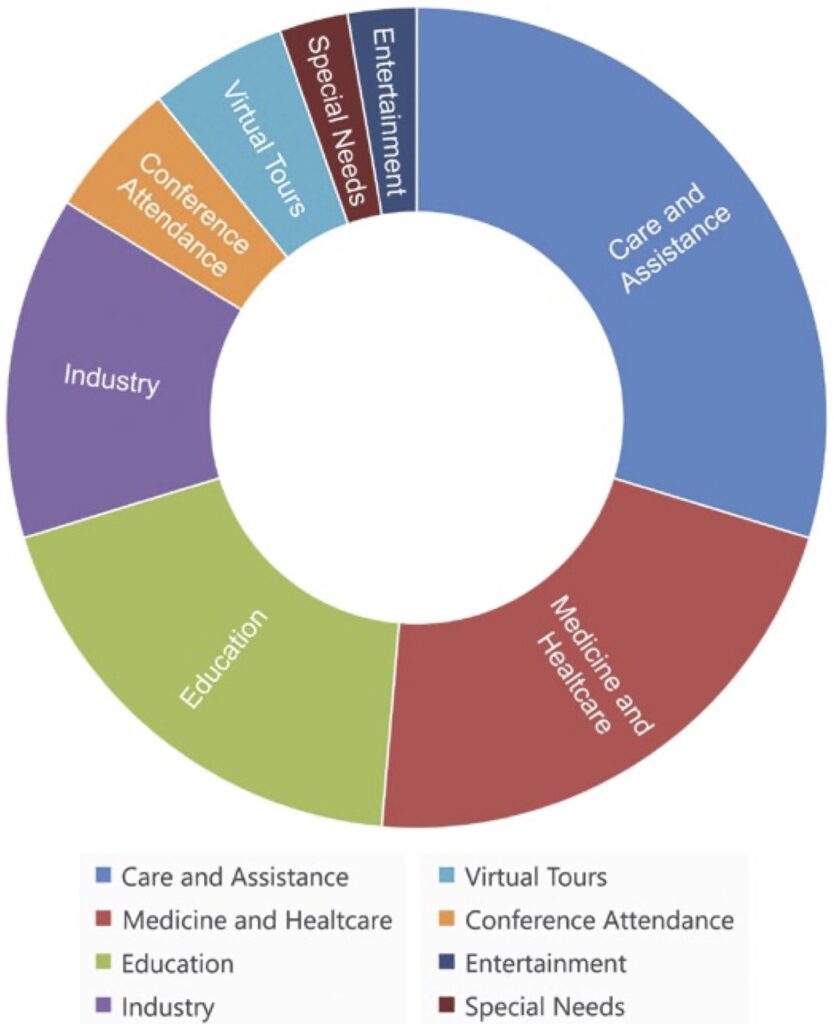
Telepräsenzsysteme werden in einer Vielzahl von Kontexten beschrieben, die jeweils unterschiedliche Aspekte der Telepräsenz und/oder Robotik nutzen, um kontextspezifische Herausforderungen zu lösen. Youssef et al. [3] geben einen prägnanten Überblick über verschiedene Anwendungsbereiche, die in der jüngsten wissenschaftlichen Literatur beschrieben werden (Bild 2). Sie stellten fest, dass das meiste Forschungsinteresse in den Bereichen Pflege und Assistenz, Medizin und Gesundheitswesen, Bildung und industrielle Anwendungen liegt. Es wurden jedoch auch Telepräsenzlösungen gefunden, die stärker soziale Aspekte abdecken, z. B. virtuelle Touren, die Teilnahme an Konferenzen oder Unterhaltung.
Durch den Fortschritt in der Medizin, Elektronik und Kommunikationstechnologie, kombiniert mit sinkenden Geburtenraten, insbesondere in Industrieländern, wächst der Bedarf an Pflege und Unterstützung für ältere Menschen [4]. Es wird geschätzt, dass roboterassistierte Operationen, tragbare Geräte und Sensoren jährlich bis zu drei Millionen Leben retten können [5]. TPRs werden auch für virtuelle Konsultationen im medizinischen und pflegerischen Kontext eingesetzt, um die Kommunikation zwischen Ärzten und isolierten Patienten zu erleichtern [6]. Im Bildungsbereich können TPRs Lehrer und Lernende aus verschiedenen Standorten virtuell zusammenbringen [7].
Auch können Lernende mit chronischen Krankheiten oder eingeschränkter Mobilität mit weniger Aufwand in einen Bildungskontext integriert werden [8]. Obwohl das Thema Remote-Arbeit seit Jahrzehnten auf Forschungsagenden steht, hat die COVID-19-Pandemie die Zahl funktionaler Lösungen für Remote-Arbeit und -Lernen erhöht.
Industrievertreter unterstützen daher den Einsatz von TPRs, da dies Zeit, Ressourcen und CO₂-Emissionen spart [9]. Bei der Anwendung in der Produktion wurden bisher mehrere Anwendungsfälle untersucht: interne Produktionsaudits, Produktentwicklung, berufliche Ausbildung, Qualitätskontrolle, Einrichtung von Ausrüstungen, Wartung und Logistik [10, 11].
In einem internationalen Kontext, d. h. bei Besprechungen multinationaler Unternehmen an verschiedenen Standorten sowie bei der Teilnahme an internationalen Konferenzen, profitieren die Teilnehmer nachweislich von einer TPR-gestützten virtuellen Teilnahme. Mit TPRs kann die Teilnahme problemlos auf Laborbesichtigungen oder Besuche vor Ort ausgedehnt werden und geht damit über die Möglichkeiten von Videokonferenzen hinaus [12-14].
Während der COVID-Pandemie wurden TPRs in Kultureinrichtungen wie Museen eingesetzt [15] und ermöglichten gemeinsame Besuche von Besuchern vor Ort und Personen aus der Ferne. Gleichzeitig wurden virtuelle Führungen getestet, die einen umfassenderen Museumsbesuch ermöglichen [16]. Auch nach COVID-19 ermöglichen TPRs die Fernteilnahme mit Familie und Freunden über (große) Entfernungen. Diese gemeinsamen Aktivitäten steigern nachweislich das Wohlbefinden und verringern das Gefühl der Isolation [17] – bei gleichzeitiger Einsparung von Reisekosten und CO₂-Emissionen als positivem Nebeneffekt.
Angesichts dieses breiten Spektrums potenzieller Anwendungsfälle stellt sich die Frage, ob die derzeit verfügbaren TPRs die Anforderungen ihrer Nutzer erfüllen und, falls nicht, ob zusätzliche Anforderungen über verschiedene Anwendungsfälle verallgemeinert werden können. Zweck dieses Beitrags ist es, die grundlegenden Anforderungen für die menschenzentrierte Entwicklung von TPRs zu skizzieren und dabei die Fortschritte in der Robotik, Sensorik und Kommunikationstechnologie zu nutzen.
Fall 1: Integration von TPRs in industrielle Arbeitsabläufe
Die Anwesenheit eines TPRs in einer Fertigungsumgebung stellt, insbesondere auf der Produktionsfläche, eine einzigartige Reihe von Anforderungen dar, um TPRs in bestehende Arbeitsabläufe zu integrieren. Diese ergeben sich aus den Umgebungsbedingungen moderner Fertigungs-, Wartungs- und Inspektionsaufgaben. Die Fallstudie im Feld mit mehreren Partnerunternehmen folgt einem iterativen, methodischen Ansatz, der in zwei Phasen unterteilt ist: In der ersten Phase, die im Folgenden vorgestellt wird, werden Anforderungen aus dem Anwendungsbereich ermittelt, die die Grundlage für die zweite Phase bilden. In dieser wird ein TPR entworfen und implementiert, um diese Anforderungen in festgelegten Arbeitsabläufen zu erfüllen; die Bewertung der Qualität der Implementierung schließt Phase 2 ab.
Um Erkenntnisse aus verschiedenen Perspektiven zu gewinnen, wurde die Anforderungserhebung mit Branchenexperten durchgeführt. Die Teilnehmer kommen aus dem Bereich der Robotik und Softwareentwicklung oder aus der Fertigung von Ladungsträgern (für die Intralogistik). Alle Teilnehmer hatten bereits Erfahrung in der Erbringung von Dienstleistungen für industrielle B2B-Kunden und sind beruflich viel unterwegs.
Zu Beginn des ersten Workshops wurden alle Teilnehmer (n=12) mit den verfügbaren TPRs vertraut gemacht, um ein gemeinsames Verständnis für die Fähigkeiten der Roboter zu entwickeln. Zu Beginn des Prozesses wurden drei aktuelle TPRs – Temi von temi Robots as a Service, Double 3 von Double Robotics und OhmniPro von OhmniLabs – hinsichtlich ihrer Vor- und Nachteile, technischen Voraussetzungen für den Einsatz und bestehenden Anwendungsbereiche vorgestellt. Im Anschluss an diese Präsentation konnten die Teilnehmer erste Erfahrungen mit der Bedienung und den Fahreigenschaften der TPRs sammeln. Diese Erfahrungen wurden diskutiert, und die Teilnehmer erarbeiteten in einer moderierten Diskussion fünf Szenarien für den möglichen TPR-Einsatz:
- Kundenbesprechungen und Einweisungen an einer Anlage oder einer Maschine
- Unterstützung durch Experten bei Wartungsaufgaben
- Schulung an einem System oder einer Maschine
- Produktabnahme von Ladungsträgern durch Kunden
- Wartung von Ladungsträgern beim Kunden vor Ort
Innerhalb der identifizierten Szenarien und entsprechend der Testnotwendigkeiten wurden den Teilnehmern TPRs für individuell ausgehandelte Testzeiträume zugewiesen, die auf den Präferenzen und der Verfügbarkeit der Teilnehmer basierten (insgesamt 16 Wochen; durchschnittliche Testzeit pro Szenario: 30,5 Minuten; 268 Tests). Die Auswertung der Feldtests erfolgte anhand eines in [18] entwickelten Ansatzes zur systematischen Evaluierung der TPR-Nutzung, der aus strukturierten Protokollen besteht, die Elemente zur Bedienung, Technologie, Interaktion und Benutzerstimmung enthalten.
Die aggregierten Testergebnisse wurden für den zweiten Workshop verwendet, in dem eine gemeinsame Diskussion der Ergebnisse unter den Teilnehmern (n=10) stattfand, um Anforderungen abzuleiten, mit denen TPRs menschengerechter gestaltet werden können (vgl. Bild 3). Anschließend wurde jede Anforderung einem von fünf Schwierigkeitsgraden (Likert-Skala: (sehr) niedrig, mittel, (sehr) hoch) für ihre Umsetzung zugeordnet, basierend auf der verfügbaren technischen Dokumentation für die TPRs, dem Experteninput von Forscherkollegen aus der Robotik/Informatik sowie dem Feedback von Entwicklern. Ein Hauptaspekt war der Einsatzbereich der TPRs, z. B. die Integration in bestehende, proprietäre Smart-Building-/Shopfloor-Systeme.
Fall 2: Verwendung von TPRs für virtuelle Touren und soziale Integration
Die soziale Integration durch technologische Hilfsmittel stellt besondere Anforderungen, die sich aus der Mensch-Maschine-Interaktion und den sozialen Routinen ergeben, die zudem nachweislich altersabhängig sind [19, 20]. Um die Anforderungen und Erwartungen an ein TPR innerhalb bestehender sozialer Routinen, z. B. einer gemeinsamen Museumsbesichtigung einer Familiengruppe, zu adressieren, liegt ein starker Fokus auf dem Potenzial des TPRs, entfernte Menschen im lokalen Raum zu repräsentieren.
Um die sozio-technischen Anforderungen an virtuelle Führungen zu erfragen, wurde eine Laborstudie mit zwei Workshops (ca. 2 Stunden) durchgeführt, die die Anforderungserhebung der industriellen Arbeitsabläufe widerspiegelt. Um den sozialen, familiären Kontext des Anwendungsfalls zu repräsentieren, wurden die Teilnehmer so rekrutiert, dass sie keine oder nur wenig Erfahrung mit einem TPR hatten (17 Teilnehmer, davon 12 ohne vorherige Erfahrung mit einem TPR).
Im ersten Workshop entwickelten die Teilnehmer gemeinsam Szenarien für einen TPR-Einsatz, woraus sich vier Möglichkeiten ergaben:
- eine Führung durch eine Schulklasse, an der ein Minderjähriger über TPR teilnimmt
- eine Führung mit einem Erwachsenen, der über TPR teilnimmt
- eine Führung mit einem Führer, der über TPR teilnimmt
- eine Bewertung eines Kunstwettbewerbs, an der ein Jurymitglied über TPR teilnimmt

Für den zweiten Workshop wurden diese Szenarien in einem zugangsbeschränkten Besprechungsraum aufgebaut, der ein Museum mit Gemälden, Fotografien und Installationen darstellt (Bild 4). Die Teilnehmer wurden in zwei Gruppen aufgeteilt, wobei eine Gruppe das Szenario durchspielte (TPR wurde von einem Assistenten aus einem separaten Raum ferngesteuert) und die andere Gruppe die Probleme und Anforderungen beobachtete und dokumentierte.
Zu Beginn des Szenarioaufbaus wurden allen Teilnehmern zwei moderne TPRs – Temi und Double 3 – vorgestellt, damit sie erste Erfahrungen mit deren Bedienung und Fahreigenschaften sammeln und sich eine erste Meinung über ihre Fähigkeiten zur sozialen Interaktion bilden konnten.
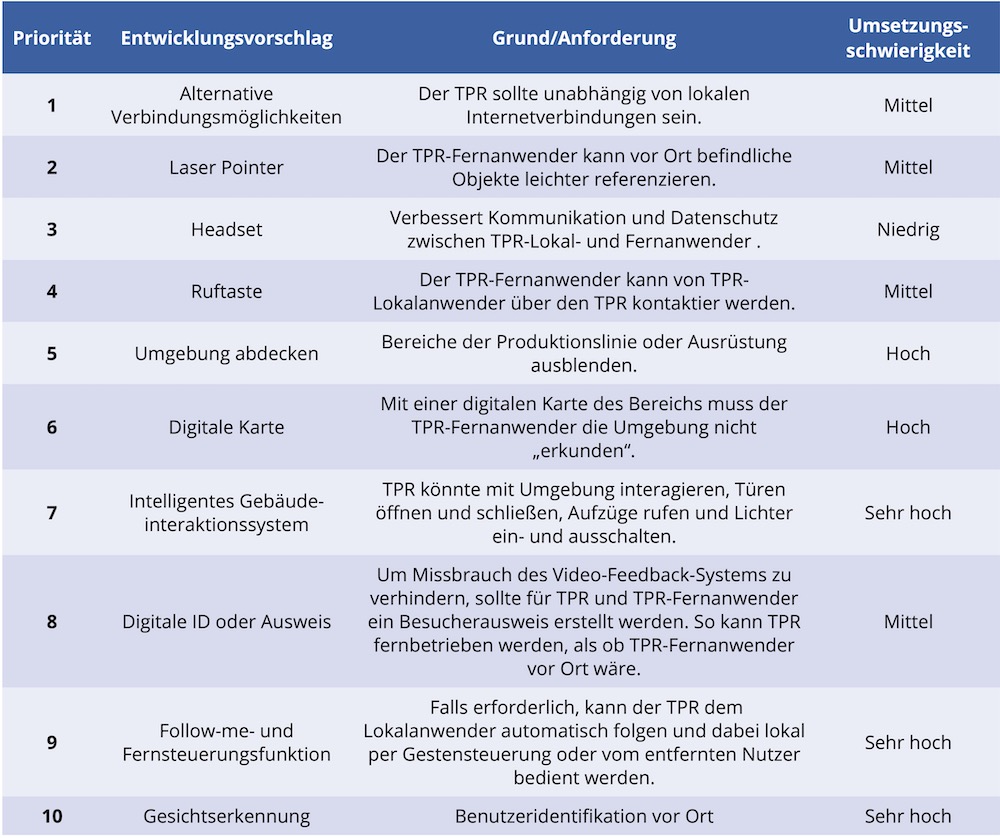
Am Ende des Workshops diskutierten die Teilnehmer in einer Gruppendiskussion gemeinsam die Probleme und ermittelten Anforderungen. Die abgeleiteten Anforderungen wurden anschließend von der Gruppe nach ihrer Priorität von der höchsten (1) bis zur niedrigsten (10) eingestuft (Bild 5). Die Teilnehmer überprüften die Notwendigkeit der vorgeschlagenen Anforderungen und je nachdem, wie oft eine Anforderung von den Teilnehmern als wichtig und realisierbar eingestuft wurde, wurde diese Rangfolge gebildet.
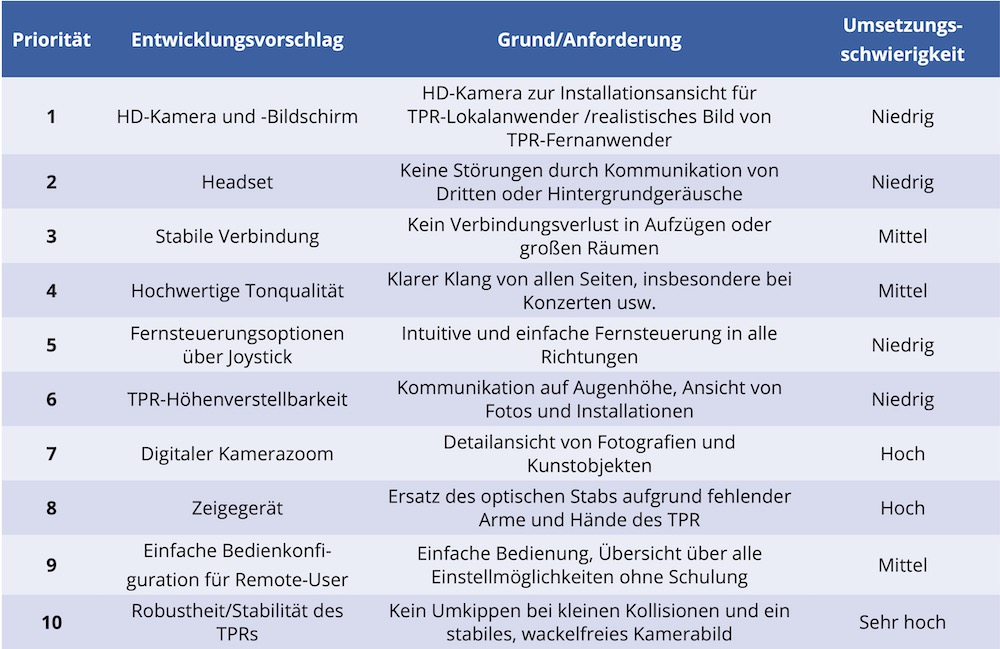
Wie bei der Studie im industriellen Umfeld wurde jeder Anforderung einer von fünf Schwierigkeitsgraden (Likert-Skala: (sehr) niedrig, mittel, (sehr) hoch) für ihre Realisierung zugewiesen. Die Einstufung basiert auf der verfügbaren technischen Dokumentation für die TPRs sowie auf dem Experteninput von Forscherkollegen, die im Bereich Robotik/Informatik arbeiten. Auch hier gilt, dass der Anwendungsbereich, d. h. die Museumsumgebung, eine Reihe von besonderen Erwägungen für diese Bewertung mit sich bringt. Am wichtigsten ist die Notwendigkeit von Sicherheitsmaßnahmen wie virtuelle Barrieren zur Vermeidung von Kollisionen mit Ausstellungsstücken sowie die Notfallkontrolle durch eine Person vor Ort.
Gemeinsamkeiten der Anforderungen von industriellen Arbeitsabläufen und virtuellen Rundgängen
Aus der Analyse der Ergebnisse geht hervor, dass sich die Bedürfnisse der Nutzer in verschiedenen Szenarien, sei es in der Produktion oder beim sozialen Engagement in einem kulturellen Umfeld, weitgehend überschneiden. Betrachtet man die drei wichtigsten Anforderungen, so stehen stabile Verbindungen, Audiounterstützung für die Kommunikation und visuelle Klarheit in beiden Kontexten im Vordergrund. Die Notwendigkeit einer stabilen Internetverbindung oder einer alternativen Verbindungsmöglichkeit ist in beiden Bereichen eine der wichtigsten Anforderungen. Dies ist nicht überraschend, da eine unterbrochene Verbindung den Nutzen der TPR-Nutzung untergräbt. Daher ist die Sicherstellung der Konnektivität von entscheidender Bedeutung und sollte vorrangig behandelt werden.
Die Audiounterstützung, in der Regel in Form von Headsets, wird von beiden Benutzergruppen sehr geschätzt, wenn auch aus unterschiedlichen Gründen. In industriellen Umgebungen, wo der Geräuschpegel hoch sein kann, erleichtern Headsets die reibungslose und private Kommunikation zwischen TPR-Lokal- und Fernanwender. In kulturellen Einrichtungen, in denen Ruhe und Stille erwartet werden, werden Headsets verlangt, um die Kommunikation zu ermöglichen, ohne andere Besucher zu stören. Ebenso wird in beiden Bereichen großer Wert auf visuelle Elemente gelegt, wenn auch zu unterschiedlichen Zwecken. In der Industrie wird ein Zeiger benötigt, um den TPR-Fernanwender das Referenzieren von Objekten vor Ort zu erleichtern, während TPR-Fernanwender als Museumsbesucher ein klares, hochauflösendes Kamerabild wünschen, um Installationen aus der Ferne zu betrachten.
Diese drei Anforderungskategorien sind grundlegend und wahrscheinlich in verschiedenen Bereichen anwendbar. Die detaillierteren und vielfältigeren Anforderungen, die für jeden Bereich spezifisch sind, sollten jedoch in diesen Kontexten und möglicherweise auch in weiteren Bereichen weiter erforscht werden.
Die in diesem Artikel vorgestellten Forschungsarbeiten wurden zum Teil durch die vom Bundesministerium für Bildung und Forschung geförderten Projekte PRaeRI (Förderkennzeichen 02L21B001) und TeleVeRbundenheit (Förderkennzeichen 16SV9138) finanziert. Die Autoren danken Lena Franzkowiak für ihre Unterstützung beim Verfassen dieses Artikels.
Literatur
[1] Minsky, M.: Telepresence. OMNI, (1980), S. 44–52.[2] Hernandez, F.; Löffler, T.; Schleicher, T.; Bullinger, A. C.: Eignung eines Telepräsenz-Roboters für die Remote-Instandhaltung. In: Instandhaltung als Erfolgsfaktor: Strategie, Lebenszyklusorientierung und Digitalisierung. 2021.
[3] Youssef, K.; Said, S.; Al Kork, S.; Beyrouthy, T.: Telepresence in the Recent Literature with a Focus on Robotic Platforms, Applications and Challenges: Robotics. (2023) URL: https://doi.org/10.3390/robotics12040111
[4] Niemelä, M.; Van Aerschot, L.; Tammela, A.; Aaltonen, I.; Lammi, H.: Towards Ethical Guidelines of Using Telepresence Robots in Residential Care. In: International Journal of Social Robotics (2021) 13, S. 431–439.
[5] Singh, R. P.; Javaid, M.; Haleem, A.; Vaishya, R.; Ali, S.: Internet of Medical Things (IoMT) for Orthopaedic in COVID-19 Pandemic: Roles, Challenges, and Applications. In: Journal of Clinical Orthopaedics and Trauma 11 (2020) 4, S. 713-717.
[6] Rojas, A.; Nørskov, S.: Interactions Afforded by Mobile Telepresence Robots in Health Care Settings. In: International Conference on Human-Computer Interaction. (Hrsg.): Springer Nature Switzerland. (2023), S. 138-145.
[7] Ahumada-Newhart, V.; Olson, J. S.: Going to School on a Robot: Robot and User Interface Design Features That Matter. In: ACM Transactions on Computer-Human Interaction (TOCHI) 26 (2019) 4, S. 1-28.
[8] Page, A.; Charteris, J.; Berman, J.: Telepresence Robot Use for Children with Chronic Illness in Australian Schools: A Scoping Review and Thematic Analysis. In: International Journal of Social Robotics (2021) 13, S. 1–13.
[9] Appinio: Future of Work Report 2022. URL: https://de.statista.com/page/der-future-of-work-report-2022, Zugriff am 19.08.2024.
[10] Darvish, K.; Penco, L.; Ramos, J.; Cisneros, R.; Pratt, J.; Yoshida, E.; Ivaldi, S.; Pucci, D.: Teleoperation of Humanoid Robots: A Survey. In: IEEE Transactions on Robotics (2023) 39, S. 1706-1727.
[11] Hernandez, F.; Waechter, M.; Bullinger, A. C.: A First Approach for Implementing a Telepresence Robot in an Industrial Environment. (2021) URL: https://doi.org/10.1007/978-3-030-79816-1_18
[12] Lee, W.; Park, J.; Park, C. H.: Acceptability of Tele-Assistive Robotic Nurse for Human-Robot Collaboration in Medical Environment. In: Companion of the 2018 ACM/IEEE International Conference on Human-Robot Interaction (2018), S. 171-172.
[13] Herring, S. C.: Telepresence Robots for Academics. In: Proceedings of the American Society for Information Science and Technology 50 (2013) 1, S. 1-4. URL: https://doi.org/10.1002/meet.14505001156
[14] Hernandez, F.; Birke, J.; Bullinger, A. C.: The Tribrid-Meeting-Setup: Improving Hybrid Meetings Using a Telepresence Robot. (2023) DOI: https://doi.org/10.1007/978-3-031-34609-5_26.
[15] Ahumada-Newhart, V.; De La Pena Jr, A.; Riek, L. D.: Promoting Access in a Mexican-American Museum during the Pandemic: Online Community Events and Robots. In: The International Journal of the Inclusive Museum 16 (2023) 2, S. 67.
[16] Kachach, R.; Perez, P.; Villegas, A.; Gonzalez-Sosa, E.: Virtual Tour: An Immersive Low Cost Telepresence System. In: Proceedings of the 2020 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), Atlanta, GA 2020. S. 504–506.
[17] Tsui, K.; Dalphond, J.; Brooks, D.; Medvedev, M.; McCann, E.; Allspaw, J.; Kontak, D.; Yanco, H.: Accessible Human-Robot Interaction for Telepresence Robots: A Case Study. In: Paladyn Journal of Behavioral Robots (2015) 6, S. 1–21.
[18] Birke, J.; Hernandez, F.; Schwarzkopf, M.; Zeiner-Fink, S.; Bullinger, A. C.: Entwicklung eines Erprobungskonzeptes für den Einsatz von Telepräsenzrobotern. In: Nachhaltig Arbeiten und Lernen. 69. Kongress der Gesellschaft für Arbeitswissenschaft e. V. 2023.
[19] Börner, K.; Löffler, T.; Bullinger-Hoffmann, A. C.: CheckAge: Screening-Verfahren für die Bewertung alter(n)sgerechter Arbeitsplätze. In: Arbeitswissenschaft und Innovationsmanagement 2 (2017).
[20] Bullinger-Hoffmann, A. C.; Löffler, T.: Die Vernetzte Organisation und der demografische Wandel. In: Vernetzte Organisation. München 2014, S. 96-101.
Ihre Downloads
Potenziale: Innovation






