


Einsatz von kollaborationsfähigen Robotern in Produktionsumgebungen |
Mitarbeiterqualifikation und Akzeptanz für die Mensch-Maschine-Interaktion
| Zeitschrift | Industry 4.0 Science |
| Ausgabe | 42. Jahrgang, 2026, Ausgabe 2, Seite 14-21 |
| Open Access | https://doi.org/10.30844/I4SD.26.2.14 |
| Literatur | Teilen | Zitieren | Download |
Abstract
Keywords
Artikel
Mit der Diskussion um Industrie 4.0 tritt die Nutzung moderner Technologie, digitalisierter Abläufe und Simulationsmöglichkeiten mehr und mehr in den Fokus aktueller Produktion. Auch KMU müssen sich diesem Trend stellen und die neuen Technologien in bestehende Abläufe integrieren. Dabei sind auch Nachhaltigkeit und die Auswirkungen auf die Beschäftigten mitzudenken. Insbesondere der Umgang mit Robotik oder gar kollaborationsfähiger Robotik [1] ist für Beschäftigte in doppelter Hinsicht voraussetzungsvoll. Zum einen müssen im Umgang mit dieser neuen Technologie neue Fähigkeiten erlernt werden. Zum anderen muss aber auch eine breite Akzeptanz dieser Technologie bei den Beschäftigten geschaffen werden, wenn ihre vollen Möglichkeiten ausgeschöpft werden sollen.
Am Beispiel von kollaborationsfähigen Robotern (Cobots) sollen die Herausforderungen und Lösungen bei KMU in Bezug auf den Einführungsprozess und die Technikakzeptanz der Beschäftigten [2, 3] näher betrachtet werden. Dabei sind insbesondere eine reibungslose Einführung und Technikintegration zentrale Größen für KMU, da die Investitionen in derartige Technik umfangreich sind und zudem oft im laufenden Betrieb erfolgen müssen. Betriebsstillstände sind innerhalb der oft knapp getakteten Lieferketten nicht möglich und knappe personelle wie finanzielle Ressourcen [4] ermöglichen keine langfristigen Einführungsprozesse.
Gleichzeitig ist die Akzeptanz der Beschäftigten eine nicht zu unterschätzende Variable. Nur wenn die neue Technologie akzeptiert wird, wird sie einen Beitrag für die Produktion leisten können. Technikakzeptanz und ein daran ausgerichteter ganzheitlicher Einführungsprozess können hier als wesentliche Stellschrauben angesehen werden, wenn diese Technologie erfolgreich integriert werden soll, sodass sich ihre spezifischen Vorteile manifestieren. Vor dem Hintergrund eines ganzheitlichen Einführungsprozesses soll eine akzeptanzförderliche Ausgestaltung in den Fokus gestellt werden. Der Einführungsprozess selbst und die Einbindung und (fortlaufende) Qualifizierung von Beschäftigten sind dabei von zentraler Bedeutung und haben wesentlichen Einfluss auf den Erfolg oder Misserfolg der Technologieeinführung in KMU.
Akzeptanz bei betrieblicher Technologieeinführung
Technologieeinführungen führen bei den Beschäftigten teilweise zu Ablehnung, die sich in einer Vielzahl von Ausprägungen verdeutlicht. Studien zeigen jedoch, dass Beschäftigte sich nicht grundsätzlich ablehnend gegenüber neuen Technologien positionieren, sondern diesen zunächst oft indifferent gegenüberstehen [2, 3].
Betrachtet man Akzeptanz näher, so wird deutlich, dass bei techniklastigen Einführungsprozessen oft einseitig von Technikakzeptanz ausgegangen wird, wobei der Prozesscharakter von Akzeptanz vernachlässigt wird. Akzeptanz muss in ganzheitlichen Einführungsprozessen jedoch gerade diesen Prozesscharakter aufnehmen, um die „Bedingtheit individueller Akzeptanz“ [5] der jeweiligen Beschäftigten betrachten zu können. Wichtig dabei ist vor allem, dass diese individuelle Akzeptanz fortlaufend geschaffen werden muss und es nicht ausreicht, diese nur einmalig, punktuell herzustellen [2].
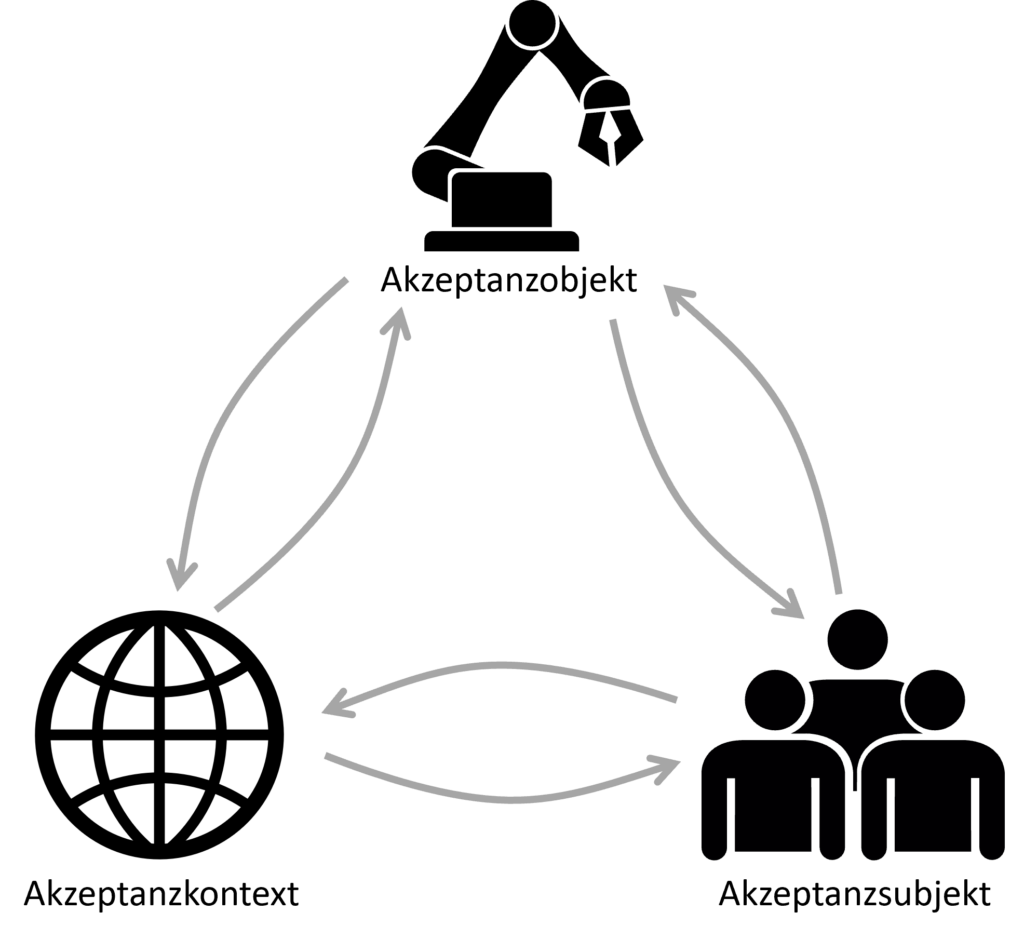
Um nun die Maßnahmen der Technologieeinführung auf diese Herausforderungen der Akzeptanzschaffung und Aufrechterhaltung abstimmen zu können, bietet sich ein darauf abgestimmtes prozessorientiertes Akzeptanzmodell an, welches das Entstehen von Akzeptanz erklärt und die Prozesse beschreibt. Das Akzeptanzmodell von Lucke [6] bietet eine solche Grundlage und erlaubt mit seinen drei Akzeptanzdimensionen eine genauere Analyse der Schaffung und Aufrechterhaltung von Akzeptanz in ganzheitlicher Sicht (Bild 1).
Entlang des Fallbeispiels einer Einführung von Cobots in einer Lebensmittelfabrik sollen die Akzeptanzdimensionen näher betrachtet werden. Daraus sollen mögliche Handlungsempfehlungen für die akzeptanzförderliche Ausgestaltung von Technologieeinführungsprozessen entwickelt werden.
Kollaborationsfähige Robotik – Cobots
Ob ein Roboter als Cobot bezeichnet werden kann, hängt davon ab, ob er in Kontakt bzw. Interaktion mit Menschen steht. Dabei gilt dieses Kriterium grundsätzlich als bereits erfüllt, wenn Mensch und Roboter parallel agieren und dabei nicht durch einen Zaun voneinander getrennt sind [7]. Es gibt aber mehrere Stufen der Interaktion, sodass ein weit entwickelter Cobot und ein Mensch dazu in der Lage sind, zeitgleich miteinander am selben Objekt zu arbeiten [7-9]. Ein Vergleich mit klassischen Industrierobotern zeigt die unterschiedlichen Einsatzmöglichkeiten auf: Klassische Roboter sind nicht mobil, vollziehen Tätigkeiten meist gleichbleibend in hoher Geschwindigkeit und bearbeiten hohe Stückzahlen, ohne mit Menschen zu interagieren [10].
Kollaborationsfähige Roboter können hingegen mobil sein, arbeiten mit geringerer Geschwindigkeit, können bei kleineren Stückzahlen flexibel eingesetzt werden und interagieren in den meisten Fällen mit Menschen [10-12]. Sie bieten wegen ihres spezifischen Profils mögliche Vorteile für sowohl Unternehmen als auch Beschäftigte. Durch kollaborationsfähige Roboter können Unternehmen potenziell schon bei niedrigeren Stückzahlen ökonomisch sinnvoll in die Automatisierung einsteigen [12, 13]. Durch die schnellere Umrüstung der mobilen und oft leichter zu programmierenden Cobots bieten sich speziell bei geringen Losgrößen gute Automatisierungspotentiale [12, 14]. Beides bietet insbesondere für KMU Vorteile.
Außerdem können menschliche Arbeitskräfte bei wachsenden Stückzahlen länger erhalten bleiben, als es der Fall wäre, wenn nur Vollautomatisierung oder manuelle Arbeit zur Verfügung stünden [12]. Die Vorteile von menschlicher Arbeitskraft (etwa Feinmotorik/Geschicklichkeit oder Erfahrungswissen) und der Arbeitskraft der Roboter (etwa Ausdauer oder Präzision) können potenziell miteinander kombiniert werden [14, 15]. Herausfordernde Aufgaben, die bisher manuell erfolgen müssen, können nun kollaborativ von Cobots und Menschen erledigt werden, wobei der Mensch die Teile der Aufgabe übernimmt, die für den Roboter zu schwierig sind [11].
Cobots sind zudem dazu in der Lage, ihre Tätigkeit so zu verrichten, dass für Menschen auch ergonomische Vorteile entstehen, z.B. indem Gegenstände auf sinnvoller Höhe angereicht werden [14, 15]. Deutlich wird damit, dass die Nutzung von Cobots vor allem ein höheres Maß an Flexibilität für die Unternehmen ermöglicht. Sie lassen sich wirtschaftlich und technisch einfacher integrieren als klassische Robotik und unterstützen menschliche Arbeitskraft. Diese Voraussetzungen bieten vor allem für KMU große Vorteile, da sie vielfach mit knappen personellen, finanziellen und organisatorischen Ressourcen agieren müssen [16, 17].
Projektanwendung – Pilotfall Lebensmittel

Das betrachtete Unternehmen kommt aus der Lebensmittelbranche und hat seinen Sitz in Italien. Das Kerngeschäft des Unternehmens ist die Verarbeitung und Verpackung von Oliven.
Hier lassen sich Cobots aufgrund besonderer Umwelteinflüsse (feuchte und/oder salzhaltige Umgebung) nicht in allen Bereichen sinnvoll einsetzen.
Die Produktion ist in vielen Bereichen durch einfache und repetitive Arbeitsschritte gekennzeichnet, die teilweise zudem körperlich belastend sind.
Hier kann Robotik einen Beitrag zur Erleichterung von Arbeitsschritten leisten, aber auch gleichzeitig mehrere Arbeitsschritte integrieren.
Geplant ist der Einsatz des Cobots (Bild 2) am Ende der Produktionslinie.
Der Anwendungsfall umfasst Tätigkeiten im Bereich der Verpackung und wird mit dem Begriff End of Line (Bild 3) zusammengefasst. Hier wird eine Cobot-Lösung genutzt, um die in unterschiedlichen Verpackungen abgefüllten Oliven letzten Qualitätsüberprüfungen zu unterziehen und dann den Versandverpackungen (z.B. Euro-Paletten) zuzuführen.

Zudem werden durch den Cobot auch Daten erfasst und im neuen MES (Manufacturing Execution System) zentral erfasst. Diese Daten helfen dem Unternehmen bei der Planung und Nachverfolgung der unterschiedlichen Bestellungen.
So können fertiggestellte Produkte besser eingeplant werden. Dies ist vor allem dann wichtig, wenn zeitkritische Bestellungen abgearbeitet bzw. derartige Kundenanforderungen beachtet werden müssen.
Aufgrund von Sicherheitsanforderungen kann ein direkter Kontakt von Mensch und Maschine nicht ermöglicht werden.
Der Cobot wird von einem unsichtbaren Schutzzaun umgeben sein (Laserscanner), der im Falle einer Verletzung des Schutzraumes den Cobot zunächst verlangsamt und dann vollständig abschaltet.
Herausfordernd gestaltet sich an dieser Stelle ebenfalls die Integration in die tatsächliche Produktionsumgebung und die Auslegung der Geschwindigkeit des Cobots. Die eigentlichen Produktionsschritte dürfen nicht unnötig verlangsamt oder gestört werden. Das Unternehmen wird daher zunächst neben dem Cobot auch den bisherigen (manuellen) Prozess weiterbetreiben. Im Folgenden wird der Anwendungsfall entlang der Akzeptanzdimensionen von Lucke [6] näher beschrieben.
Neue technisch-soziale Lösungen – Das Akzeptanzobjekt
Der Begriff Akzeptanzobjekt soll die Einführung des Cobots in die täglichen Arbeitsläufe der Fabrik am Ende der Produktionslinie (End of Line) beschreiben. Als technisch-soziale Neuerung betrifft sie nicht nur die technische Ausstattung der Fabrik, sondern beeinflusst auch die Betriebsabläufe in der Produktion. Mit ihr möchte das Unternehmen die begonnene interne Vernetzung (Einführung MES) weiter vorantreiben und belastende Arbeitsschritte mittelfristig automatisieren. Somit hat das Unternehmen den Cobot in eine Gesamtstrategie der weiteren Vernetzung integriert (MES-System, Anpassung weiterer Prozesse) und darin vor allem den Flexibilitätsgewinn des Cobots herausgestellt.
Die Mitarbeitenden im Betrieb – Akzeptanzsubjekte
Akzeptanzsubjekte sind die Beschäftigten, die schlussendlich mit dem Cobot arbeiten müssen. Sie haben erheblichen Einfluss auf den Erfolg der technischen Implementation und damit auf das gesamte Projekt der Cobot-Nutzung. Grundsätzlich erwartet das Unternehmen aktuell zwar wenige Unsicherheiten der Beschäftigten, da technische Veränderungen in der Produktion durchaus üblich sind. Gleichwohl stellt die Nutzung kollaborativer Robotik hier eine andere Stufe dar, da die Beschäftigten hier konkreter in Interaktion mit dem Cobot treten müssen.
Die wesentliche Herausforderung sieht das Unternehmen aktuell in der Darstellung des Nutzens für die Beschäftigten. Der Cobot ist nicht in der Lage, die aktuelle Geschwindigkeit des manuellen Prozesses zu erreichen. Ein Nutzen für die Beschäftigten könnte also eher hinsichtlich der Flexibilität im Einsatz des Cobots auftreten, der dazu dient, Beschäftigte zu entlasten. Ein weiterer möglicher Fallstrick ist, ob die Mitarbeiter die Cobots als Bedrohung ihrer eigenen Beschäftigung begreifen oder eher als Unterstützung im Arbeitsalltag.
Rahmenbedingungen der Einführung – Der Akzeptanzkontext
Wie aus den vorangegangenen Absätzen deutlich wird, kann die Einführung eines Cobots – wie auch anderer technisch-sozialen Neuerungen – als Annäherungsprozess zwischen Akzeptanzsubjekt und -objekt begriffen werden. Wie gut es gelingt, ist maßgeblich vom Akzeptanzkontext abhängig, der als vermittelnder Faktor auftritt.
Der Einführungsprozess, der als zentrales Element für den Erfolg der technischen und organisatorischen Umsetzung [2] zu verstehen ist, ist im vorliegenden Fall durch technische Verzögerungen immer wieder verlangsamt worden. Dies stellte das Unternehmen vor die Herausforderung, Informationen sinnvoll zu teilen, um die Beschäftigten an der Linie einzubinden. Das Unternehmen hat sich daher dazu entschlossen den Prozess zweigeteilt durchzuführen.
Die technische Abteilung und die Führungskräfte waren bereits zu Beginn Teil des Prozesses und haben diesen aktiv mitgestalten können. Vor allem die Integration des Cobots in das neue MES-System und dessen Anbindung war dabei wichtig. Dies vor dem Hintergrund, dass darüber auch Tätigkeiten der Beschäftigten vereinfacht werden können, da sie teilweise auch vom Cobot übernommen werden können (Erfassung von Daten, etc.). Die Einbindung der Beschäftigten erfolgte in diesem Schritt daher indirekt über die Führungskräfte.
Im zweiten Schritt ist dann entlang des Trainingsprogramms und der Vor-Ort-Schulungen auch eine direkte Einbindung der Beschäftigten an der Produktionslinie geplant. Dabei ist das modulare Trainingsprogramm derart gestaltet, dass es Feedback der Beschäftigten aufnehmen wird, um dies in die Anpassung des Trainings einfließen zu lassen. So werden die Beschäftigten an der Linie zwar erst später in den Umsetzungsprozess eingebunden, erhalten jedoch die Möglichkeit die Technik noch anzupassen und Feedback einzuspeisen.
Grundsätzlich schätzen die Führungskräfte die Akzeptanz der Beschäftigten als gegeben ein, da bisherige technische Veränderungsprozesse reibungslos abgelaufen sind. Wenngleich die Einführung des Cobots hier eine größere Veränderung darstellt, ist nicht davon auszugehen, dass diese nicht akzeptiert wird. Zudem sind mit dem Trainingsprogramm und der parallelen Ausgestaltung des End-of-Line-Prozesses Maßnahmen zur partizipativen Einführung getroffen worden.
Einflussfaktoren – Co-Creation und Schulung als Lösung?
Im Fallbeispiel zeigt sich eine vor allem technikdominierte Einführungsstrategie. Der Cobot steht im Mittelpunkt der Veränderung. Gleichwohl zeigt sich, dass der Einführungsprozess nicht einseitig aus technischer Sicht umgesetzt wurde. Basierend auf einer der zentralen Annahmen von Industrie 5.0 [18] – der Menschzentrierung – wurde der Prozess auch an den Anforderungen der Beschäftigten ausgerichtet. Auf eine anwenderorientierte Gestaltung des Cobots (Akzeptanzobjekt) und seiner Bedienelemente wurde Wert gelegt. Auch wenn diese nicht in einem gemeinsamen Entwicklungsprozess entstanden sind, nehmen sie doch Ergebnisse vorheriger Rückmeldungen auf und richten sich an den Wünschen der Bediener aus.
Des Weiteren ist eine Phase des Ausprobierens durch die Beschäftigten, flankiert von Trainingsmaßnahmen, vorgesehen, um Anlaufschwierigkeiten begegnen zu können. So wird die neue Technik nicht ad hoc eingeführt und kann durch den geplanten parallelen Testbetrieb zunächst ausprobiert werden [2]. Auch hierfür wurden Vorgaben von betrieblicher Seite durch den Einbezug des technischen Personals und der Arbeitsvorbereitung aufgenommen. Über das Trainingsprogramm sollen vor allem mögliche Vorbehalte oder Ängste im Umgang mit dem Cobot ausgeräumt und die Beschäftigten für den Umgang mit dem Cobot qualifiziert werden. Auch der alltägliche Nutzen des Cobots für die Beschäftigten wird darüber verdeutlicht.
Als zentrales Element für die Schaffung von Akzeptanz gilt der Einführungsprozess (Akzeptanzkontext), dessen Ausgestaltung wesentlichen Einfluss auf den Erfolg der Technikeinführung hat und damit auf die Akzeptanz der Beschäftigten (Akzeptanzsubjekten). Das Unternehmen hat hier versucht die (technischen) Beschäftigten sehr früh in den Prozess einzubinden und ebenso eine nahtlose Integration in das neue MES herzustellen. Der Cobot soll sich so in die bestehende Infrastruktur einfügen.
Synthese der Ergebnisse und Diskussion
Entlang möglicher Einflussfaktoren auf Akzeptanz [5, 19, 20] hat das Unternehmen versucht, den Einführungsprozess so zu gestalten, dass zunächst eine möglichst breite Akzeptanz der Beschäftigten zu erwarten ist. Diese Vorgehensweise ist insbesondere für KMU wichtig, um Investitionen in neue Technologie schnell und nahtlos in die produktiven Prozesse einzubinden. Legt man dabei die Einflussfaktoren auf Akzeptanz an die dargestellten Akzeptanzdimensionen an, kann man den Prozess der Technikeinführung reibungsloser und effektiver gestalten.
Eine wichtige Erkenntnis aus dem vorgestellten Fallbeispiel ist, dass den Rahmenbedingungen ein großes Gewicht zukommt. So hat der Akzeptanzkontext den wohl größten Einfluss [2] auf die Akzeptanz der Beschäftigten und damit auf die Akzeptanzsubjekte. Dessen Gestaltung spielt damit die zentrale Rolle in der Akzeptanzschaffung.
Dieser Beitrag wurde von der Europäischen Union finanziert (Projekt 101091877). Die darin geäußerten Ansichten sind jedoch ausschließlich die der Autoren und spiegeln nicht unbedingt die der Europäischen Union oder der European Health and Digital Executive Agency (HaDEA) wider.
Dies ist ein Originalbeitrag. Die englische Übersetzung finden Sie unter der DOI: 10.30844/I4SE.26.2.14
Literatur
[1] ISO 10218-1/2 (2025). URL: https://www.tuv-nord.com/tw/en/homepage/product-and-service/product-safety/iso-10218-1-2/, Abrufdatum 12.01.2026.[2] Abel, J.; Hirsch-Kreinsen, H.; Wienzek, T.: Akzeptanz von Industrie 4.0. Abschlussbericht zu einer explorativen empirischen Studie über die deutsche Industrie.
[3] acatech – Deutsche Akademie der Technikwissenschaften (Hrsg.): Akzeptanz von Industrie 4.0, Zwischenbericht zum Forschungsprojekt Akzeptanz und Attraktivität der Industriearbeit 4.0. 2019.
[4] Welter, F.; Levering, B.; May-Strobl, E.: Mittelstandspolitik im Wandel. Bonn 2016.
[5] Krebber, F.: Akzeptanz durch inputorientierte Organisationskommunikation, 1. Aufl. Wiesbaden 2016.
[6] Lucke, D.: Akzeptanz. Legitimität in der Abstimmungsgesellschaft. Wiesbaden 1995.
[7] El Zaatari, S.; Marei, M.; Li, W.; Usman, Z.: Cobot programming for collaborative industrial tasks: An overview. In: Robotics and Autonomous Systems 116 (2019), S. 162-80.
[8] ifaa: Mensch-Roboter-Kollaboration (MRK). URL: https://www.arbeitswissenschaft.net/angebote-produkte/ifaa-lexikon/mensch-roboter-kollaboration-mrk, Abrufdatum 04.08.2025.
[9] Kunert, A.; Thun, A.; Göckeritz, T.: Empfehlung zur Gewährleistung der Sicherheit bei MRK. In: Hees, F.; Müler-Abdelrazeq, S.; Langer, T.; Voss, M.; Schmitt, R. H. et al. (Hrsg.): Projektatlas Kompetenz Montage. Kollaborativ und wandlungsfähig. 2019.
[10] Knudsen, M.; Kaivo-Oja, J.: Collaborative Robots: Frontiers of Current Literature. In: Journal of Intelligent Systems: Theory and Applications (2020), S. 13-20.
[11] Kragic, D.; Gustafson, J.; Karaoguz, H.; Jensfelt, P.; Krug, R.: Interactive, Collaborative Robots: Challenges and Opportunities. In: Lang, J. (Hrsg.): Proceedings of the Twenty-Seventh International Joint Conference on Artificial Intelligence 2018.
[12] Kopp, T.; Schäfer, A.; Kinkel, S.: Kollaborierende oder kollaborationsfähige Roboter? Welche Rolle spielt die Mensch-Roboter-Kollaboration in der Praxis? In: Industrie 4.0 Management (2020) 2, S. 19-23.
[13] Härdtlein, C.; Hillgartner, L.; Berger, J.: Leitfaden für den ortsflexiblen Einsatz von Leichtbaurobotern. Praxisnah. Anwenderfreundlich. Prägnant. 2021.
[14] Steil, J. J.; Maier, G. W.: Kollaborative Roboter: universale Werkzeuge in der digitalisierten und vernetzten Arbeitswelt. In: Maier, G. W.; Engels, G.; Steffen, E. (Hrsg.): Handbuch Gestaltung digitaler und vernetzter Arbeitswelten. Berlin, Heidelberg 2020.
[15] Wellbrock, E.: Mensch-Roboter-Kollaboration in der industriellen Anwendung. Beispiele und Erfahrungen aus der Montagetechnik. 2017.
[16] Campagna, S.: KMU-spezifische Ressourcen als Voraussetzung für die Wettbewerbsfähigkeit. Dortmund, Techn. Univ., Diss., 2009. Hamburg 2010.
[17] Wienzek, T.: Boundary Spanner und Promotoren in Innovationskooperationen nichtforschungsintensiver KMU. Dortmund, Techn. Univ., Diss., 2013, 1. Aufl. München, Mering 2014.
[18] ERA industrial technologies roadmap on human-centric research and innovation for the manufacturing sector, 1. Aufl. Luxembourg 2024.
[19] Hüsing, B. (Hrsg.): Technikakzeptanz und Nachfragemuster als Standortvorteil. Abschlussbericht an das Bundesministerium für Bildung und Forschung, Referat Z22, vertreten durch den Projektträger VDI/VDE-Technologiezentrum Informationstechnik GmbH. Karlsruhe 2002.
[20] Sauer, A.; Luz, F.; Suda, M.; Weiland, U.: Steigerung der Akzeptanz von FFH-Gebieten. Abschlussbericht. Bonn 2021.





