

Intentionserkennung in automatisierten Lagerhallen | 
|
| Zeitschrift | Industrie Management |
| Ausgabe | 24. Jahrgang, 2008, Ausgabe 4, Seite 49-52 |
| Teilen | Zitieren | Download |
Abstract
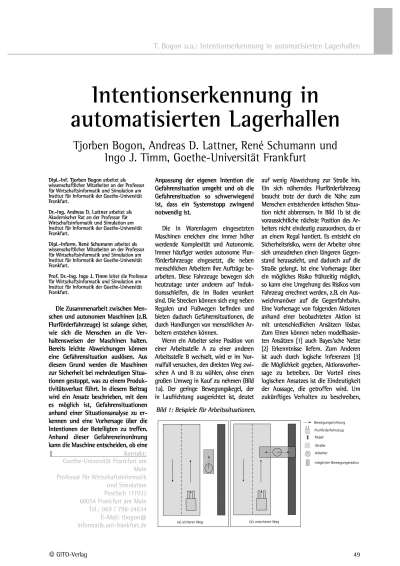
Die Zusammenarbeit zwischen Menschen und autonomen Maschinen (z.B. Flurförderfahrzeuge) ist solange sicher, wie sich die Menschen an die Verhaltensweisen der Maschinen halten. Bereits leichte Abweichungen können eine Gefahrensituation auslösen. Aus diesem Grund werden die Maschinen zur Sicherheit bei mehrdeutigen Situationen gestoppt, was zu einem Produktivitätsverlust führt. In diesem Beitrag wird ein Ansatz beschrieben, mit dem es möglich ist, Gefahrensituationen anhand einer Situationsanalyse zu erkennen und eine Vorhersage über die Intentionen der Beteiligten zu treffen. Anhand dieser Gefahreneinordnung kann die Maschine entscheiden, ob eine Anpassung der eigenen Intention die Gefahrensituation umgeht und ob die Gefahrensituation so schwerwiegend ist, dass ein Systemstopp zwingend notwendig ist.
Keywords
Zugang beschränkt
Sie sind zur Zeit nicht angemeldet / noch nicht registriert.
Um die gewünschte(n) Datei(en) herunterladen zu können, müssen Sie über ein entsprechendes inklusiv-Abonnement verfügen. Alternativ können Sie den Zugang auch durch Zahlung eines Einmalpreises erhalten.
| Abo | inklusive | Einzelkauf |
|---|---|---|
| ohne | − | 29,00 € |
| Digital | ✓ | 0,00 € |
| Expert | ✓ | 0,00 € |
| Professional | ✓ | 0,00 € |
Alle Preise enthalten 7% Mehrwertsteuer
Nach Erwerb der Zugangsrechte werden Sie automatisch wieder zu dieser Seite zurückgeleitet.
Potenziale: Produktpiraterie